

28.1. Управление скоростью двигателя постоянного тока
В электродвигателях постоянного тока крутящий момент порождается реакцией между двумя магнитными полями: одно поле устанавливается стационарной обмоткой возбуждения, а другое – обмотками во вращающемся якоре. У некоторых двигателей постоянного тока отсутствует обмотка возбуждения, вместо которой установлены большие постоянные магниты, сохраняющие стационарное магнитное поле постоянным при любых рабочих условиях.
В любом случае, принцип работы электродвигателя постоянного тока заключается в том, что ток, проходя через якорь, создает магнитное поле, пытающееся выровняться со стационарным полем. И поэтому якорь вращается:

Однако, коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания происходит через угольные щетки. Эти щетки изнашиваются через определенное время (как и сам коллектор) и поэтому требуют периодической замены.
Большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху. Фотография большого (1250 л. с.) электромотора постоянного тока, используемого для приведения в движение парома, с обмотками и якорем показана здесь:

Видео:Как определить скорость вращения вала электродвигателя и его мощность.Скачать


В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
- Момент прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря;
- Момент также прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
- Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов);
- Следовательно, скорость прямо пропорциональна напряжению якоря;
- Также скорость обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).
Очень простой способ управления скоростью и моментом двухобмоточного двигателя постоянного тока заключается в управлении величиной тока, проходящего через возбуждающую обмотку:

Уменьшающееся сопротивление токозадающего резистора, позволяет большему току протекать через возбуждающую обмотку, усиливая ее магнитное поле. Это окажет два эффекта на работу двигателя: во-первых, двигатель будет производить больший момент, чем был до этого (при той же величине тока якоря), так как более сильное магнитное поле якоря будет воздействовать на якорь; во-вторых, скорость двигателя уменьшится, так как большая противо-ЭДС будет генерироваться вращающимся якорем при той же скорости вращения, и эта противо-ЭДС естественно попытается сравняться с приложенным напряжением источника постоянного тока. С другой стороны, мы можем увеличить скорость электродвигателя постоянного тока (и уменьшить выходной момент) увеличением сопротивления управляющего резистора, ослабляя стационарное магнитное поле, которое вращает якорь.
Регулированием тока обмотки можно менять баланс между скоростью и моментом, но этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока мы также должны управлять напряжением и током якоря. Переменные резисторы можно применить и для этой задачи, но этот метод не используется в настоящее время, так как приводит к потере мощности.
Видео:Как определить мощность, частоту вращения, двигателя без бирки или шильдика самому и простоСкачать

Лучшим решением будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.


Такая электронная схема регулирования мощности обычно называется приводом. Таким образом, привод с регулируемой скоростью (или VSD ) – это высокомощная схема, используемая для управления скоростью двигателя постоянного тока. Моторные приводы могут быть вручную настроены на пуск двигателя с заданной скоростью, или могут принимать электронные управляющие сигналы для изменения скорости двигателя таким же образом как электронные сигналы управляют движением регулирующего клапана. Оснащенный дистанционной системой передачи управляющих сигналов, привод функционирует подобно любому другому конечному исполнительному элементу: следуя командам контроллера, стабилизирует некий технологический параметр, приближая его к уставке.
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры. Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел:

Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Привод постоянного тока просто регулирующий мощность, поступающую к двигателю, был бы непродуманным и трудно применимым для управления большинством процессов. Чего бы в идеале хотелось от регулируемого привода, так это точного управления скоростью двигателя. По этой причине большинство приводов рассчитано на получение обратной связи от тахометра, механически соединенного с валом мотора. Тахометр обычно представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала (с выходом 0-10 В). По его показаниям регулируемый привод дросселирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея встроенный контур обратной связи для регулирования скорости, регулируемый привод становится «ведомым контроллером» в системе управления. Привод может принимать выходной сигнал уставки скорости от любого контроллера:
Читайте также: Подшипник первичного вала ваз 2112 где находится
Регулирование скорости двигателей постоянного тока
Видео:Регулирование скорости двигателя постоянного тока (ШИМ)Скачать


Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U . Ток в цепи якоря I я и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
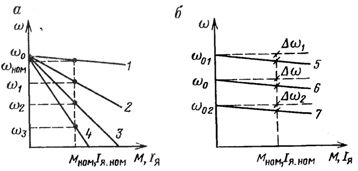
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря . Схема включения двигателя для этого случая представлена на рис. 1 , а электромеханические и механические характеристики — на рис. 2 , а.
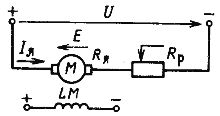
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
Видео:Схема двигателя постоянного тока. Устройство и принцип работы.Скачать

Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен ( D = 2 — З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.

При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4 .
Видео:Элетродвигатель постоянного тока 4ПО80В1 подключение вращения в право и левоСкачать

Механические характеристики для различных значений потока двигателя приведены на рис. 2 , а и 2 , б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Видео:Регуляторы скорости вращения двигателя! Небольшая сборка и двигатель становится послушным!Скачать

🔍 Видео
Регулятор скорости двигателя постоянного токаСкачать

Управление скоростью вращения двигателяСкачать

КАК УЗНАТЬ ОБОРОТЫ ПРИ ПОМОЩИ ТЕЛЕФОНА.Скачать

Регулятор оборотов двигателя постоянного тока на ШИМ контроллереСкачать
Как за 5 секунд узнать обороты электродвигателя без таблички без разборкиСкачать

Какой блок питания и способ регулировки лучше использовать для электродвигателя постоянного тока 775Скачать

Переменный ток для реверса изменения направления вращения вала двигателя постоянного токаСкачать

Пассивный, электромагнитный способ быстрого торможения вала электродвигателя постоянного токаСкачать

Регулируем скорость вращения двигателя постоянного тока для игрушекСкачать

Как нельзя регулировать скорость вращения электродвигателяСкачать

Способы регулирования частоты вращения якоря машины постоянного токаСкачать

Электродвигатели постоянного токаСкачать

Управление двигателем постоянного тока, линейным приводом. АрдуиноСкачать

Датчики вращения: энкодеры и тахогенераторыСкачать
