


Намоточный станок для намотки секций всепных обмоток электродвигателей из эмальпровода круглого сечения, является ровесником всей электротехнической промышленности. Всё начиналось с ручной намотки, при помощи кривого вала и велосипедной цепи. Позже появились станки с громоздкими коробками передач, затем скорость вращения изменялась при помощи вариатора, а учёт витков производился механическими счётчиками с гибким валом. Всё это оборудование и сегодня продолжает безотказно работать, выполняя свои основные функции. Намоточный станок 04.02.15 был спроектирован с учётом накопленного многолетнего опыта эксплуатации, по принципу «ничего лишнего». На сегодня-это оптимальное предложение по сумме потребительских качеств, цене, производительности, простоте в обслуживании и надёжности.
Станок прошёл продолжительные ресурсные испытания на собственном ремонтном производстве. В его конструкции учтены все замечания наших технологов, мастеров и обмотчиц, как с точки зрения производительности, эргономики, так с точки зрения универсальности и безопасности. При проектировании были применены самые современные принципы управления скоростью вращения, с возможностью реверса и мгновенной остановкой план-шайбы. Установлен программируемый электронный счётчик оборотов. Универсальность станка обеспечена широким диапазоном средней длины витка с применением намоточных шаблонов разных типоразмеров, входящих в комплект поставки. Вместе с тем намоточный станок предельно прост в эксплуатации, не требователен к качеству и периодичности технического обслуживания. Обучение персонала работе на данном станке не требует сложных обучающих программ, проходит на интуитивном уровне. Малая потребляемая мощность позволит эксплуатировать намоточный станок в цехах с низкой установленной мощностью электрических сетей. ООО «НПП»РЭР» постоянно модернизирует выпускаемое оборудование. Мы сами эксплуатируем своё оборудование, мы поддерживаем «обратную связь» с предприятиями, эксплуатирующими наши станки. Подобный мониторинг позволяет учитывать, в режиме реального времени, все пожелания эксплуатирующих оборудование специалистов. Постоянно совершенствовать конструкцию станков.
Наш конструкторский отдел с готовность рассмотрит и спроектирует оборудование, исходя из индивидуальных требований Заказчика, по предоставленному техническому заданию.
- Станок для намотки катушек
- Делаем машину для намотки тороидальных катушек на базе Arduino
- Комплектующие
- Подробности сборки
- Намоточное кольцо
- Катушка
- Корпус машины
- Ролики-держатели тороида
- Крепление шагового двигателя
- Двигатель постоянного тока
- Инфракрасный датчик
- Основание аппарата
- Корпус контроллера
- Схема подключения
- Навигация в меню
- 📺 Видео
Видео:Станок для намотки обмоток двигателейСкачать

Станок для намотки катушек


Посетители сайта уже знакомы с данным автором. В частности с его самоделкой «Магнитная левитация с помощью катушки соленоида».
В процессе работы над той самоделкой, мастер решил, что нужно сделать устройство для намотки катушек.
Именно об изготовлении такого станка и будет данная статья.
На видео ниже, с 1 минуты 50 секунд, можно посмотреть пример работы данного устройства.
Шаг первый: подключение
Схема подключения очень простая. Мастер просто подключил плату расширения к Arduino Uno R3 и подключил кабели к 2 шаговым двигателям. Два драйвера шагового двигателя A4988 также были подключены к плате в положениях X и Y.
Есть 2 оси для намотки катушек, которые называются:
Ось подачи (питателя): подключение к оси X, отмеченной на щите ЧПУ.
Ось шпинделя: подключение к оси Y, отмеченной на щите ЧПУ.




















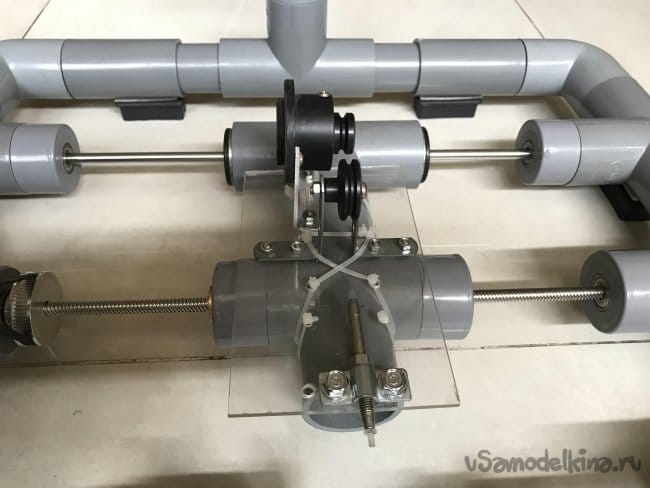
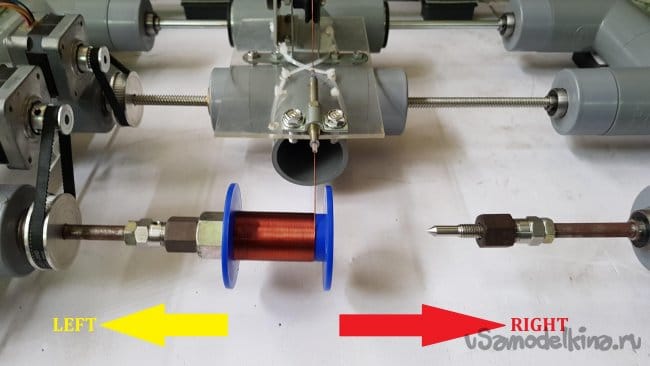
Шаг восьмой: натяжной ролик
В конструкции мастер использовал стальные L-опоры для крепления 2 резиновых роликов на одном акриловом листе, а затем установил этот натяжной направляющий ролик на ось питателя.
Читайте также: Мотор isuzu вилочный погрузчик
Чтобы подать медную проволоку к шпинделю, была использована небольшая стальная трубка с пластиковыми стержнями от ручки на концах.




Шаг девятый: GRBL* и UGS**
*GRBL — программное обеспечение, позволяющее управлять станком с ЧПУ, подключённого к плате Arduino (или аналогов) через USB-порт.
Параметры GRBL для данного намотчика катушек следующие:
$0 10.000 Step pulse time
$1 25.000 Step idle delay
$2 0.000 Step pulse invert
$3 0.000 Step direction invert
$4 0.000 Invert step enable pin
$5 0.000 Invert limit pins
$6 0.000 Invert probe pin
$10 1.000 Status report options
$11 0.010 Junction deviation
$12 0.002 Arc tolerance
$13
0.000
Soft limits enable
$21
0.000
Hard limits enable
$22
0.000
Homing cycle enable
$23
0.000
Homing direction invert
$24 25.000 Homing locate feed rate
$25 500.000 Homing search seek rate
$26 250.000 Homing switch de-bounce delay
$27 1.000 Homing switch pull-off distance
$30 1000.000 Maximum spindle speed
$31 0.000 Minimum spindle speed
$32 0.000 Laser-mode enable
$100 600.000 X-axis travel resolution
$101 4800.000 Y-axis travel resolution
$102 250.000 Z-axis travel resolution
$110 500.000 X-axis maximum rate
$111 500.000 Y-axis maximum rate
$112 2000.000 Z-axis maximum rate
$120 5.000 X-axis acceleration
$121 5.000 Y-axis acceleration
$122 10.000 Z-axis acceleration
$130 200.000 X-axis maximum travel
$131 200.000 Y-axis maximum travel
$132 200.000 Z-axis maximum travel
Важные параметры, для которых нужно выполнить калибровку, выделены в таблице выше.
Подробная информация о параметрах 100 и 101 обсуждается на следующем шаге.
Параметры ускорения 120 и 121 должны быть установлены на небольшое значение, в зависимости от диаметра провода, чтобы предотвратить его обрыв.
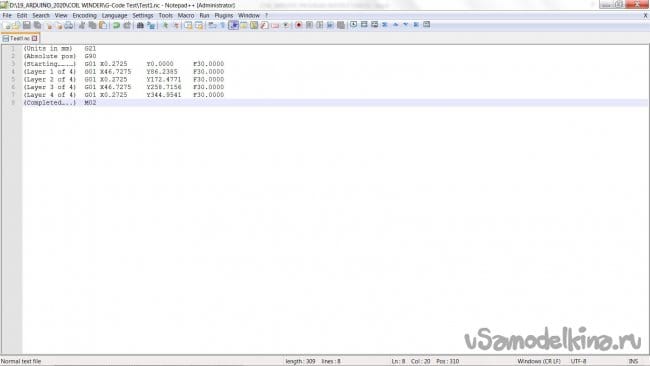
**UGS — полнофункциональная платформа gcode, используемая для взаимодействия с продвинутыми контроллерами ЧПУ, такими как GRBL , TinyG , g2core и Smoothieware.
Для настройки параметров открываем UGS, выбираем порт и множество бод для 115200. Нажимаем на Connect на вкладке.
Выбираем подходящее положение, перемещая ось X влево — вправо, вращая ось Y по часовой стрелке — против часовой стрелки.
Устанавливаем исходные координаты кнопкой Reset Zero.
Ось питателя: значение $ 100 было установлено на 600 Шаг / мм .
Ось шпинделя: у данного шагового двигателя было 200 шагов на оборот и шкив с 20 зубьями. Он был соединен с валом вращения через шкив с 60 зубьями, и был включен микрошаг 1/8. Таким образом, было установлено значение 101 $: 200 x (60/20) x 8 = 4800 STEP / rev .
Можно проверить, правильно ли работает ось шпинделя, используя UGS и указав ему переместиться на 1 мм. Если он делает ровно один оборот, значит настройки верны.
Читайте также: Лодочный мотор ямаха в набережных челнах
В верхней части таблицы выше, команда « G01 » подает команду на перемещение оси податчика с 0,15 на 46,85, а шпиндель вращается на 156,67 оборота.
Ранее мастер не был знаком с G-кодом, но после прочтения руководства я понял, что « G01 XYF » — это команда линейного перемещения по координатам (X, Y) со скоростью подачи F, что означает, что оси подающего механизма и шпинделя будут линейно перемещаться вместе. В данном случае питатель переместится в конечную точку 46,85, в то время как шпиндель совершит 156,67 оборота.
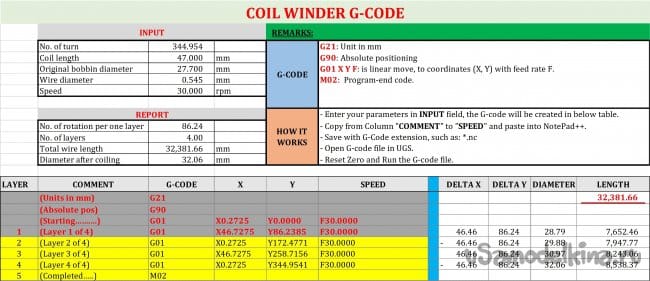
Если пользователь хочет получить идеальную катушку, то нужно обращать внимание на то, когда ось питателя меняет направление, в этот момент проволока может запутаться. Можно добавить команду G-кода, чтобы останавливать устройство на определенное время, в каждый момент реверсирования питателя, и вносить коррективы, например:
Видео:Мои шаблоны,для намотки секций катушек.Скачать

Делаем машину для намотки тороидальных катушек на базе Arduino
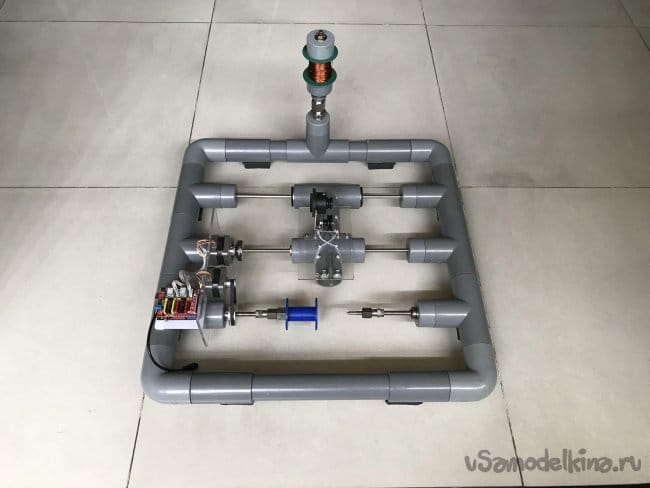
Всем привет, представляю вам изготовленную мною машину для намотки тороидальных катушек на базе Arduino. Машина автоматически наматывает проволоку и поворачивает тороид. В качестве интерфейса я использовал энкодер и ЖК-экран 16×2. Пользователь может вводить такие параметры, как диаметр катушки, количество оборотов и угол намотки.
В данной статье я расскажу, как построить эту машину и дам подробности её работы.
Видео:Ручное приспособление для намотки катушек WH-737Скачать

Комплектующие
Видео:Самый простой полуавтоматический станок для намотки трансформаторов и катушекСкачать

Подробности сборки
Намоточное кольцо


Кольцо я изготовил из фанеры 12 мм. Внешний диаметр – 145 мм, внутренний – 122 мм. Имеется углубление длиной 43 мм и глубиной 5 мм для катушки.
В кольце я сделал один разрез и замок для его открывания. Открыв замок, мы размещаем тороидальную катушку внутри кольца.
Также у кольца есть углубление по внешней стороне, 8 мм шириной и 4 мм глубиной, в котором размещается ремень шириной 6 мм.
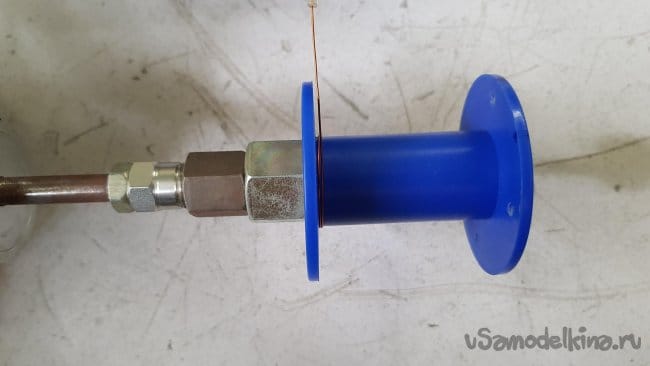
Катушка

Катушка для медного провода, которую я выточил из нейлонового стержня. Все размеры показаны на картинке.
Материал выбран потому, что нейлон, во-первых, легче алюминия, во-вторых, его легко точить на станке. Кроме того, когда машина работает, он не колеблется так сильно.
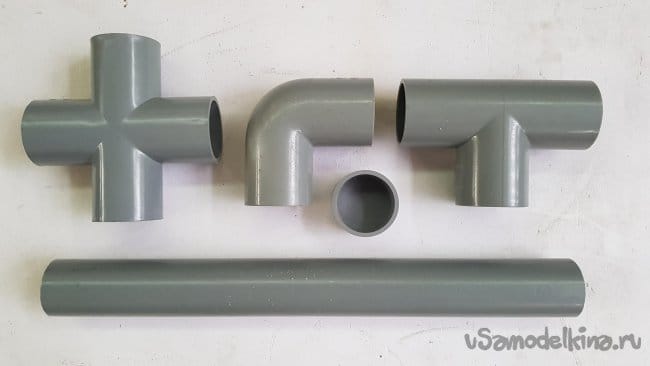
Корпус машины





Корпус также сделан из фанеры 12 мм. На нём закреплены три направляющих ролика, расставленные примерно в 120° друг от друга.
Ролики сделаны из подшипников 626Z, гаек и болтов. На них будет вращаться наше деревянное намоточное кольцо.
Верхняя часть кольца откидывается, а после закрытия зажимается при помощи барашковой гайки. Откинув эту часть, мы устанавливаем кольцо внутрь машины. Вернув её на место, нужно прижать к ней ролик так, чтобы он вошёл в бороздку.
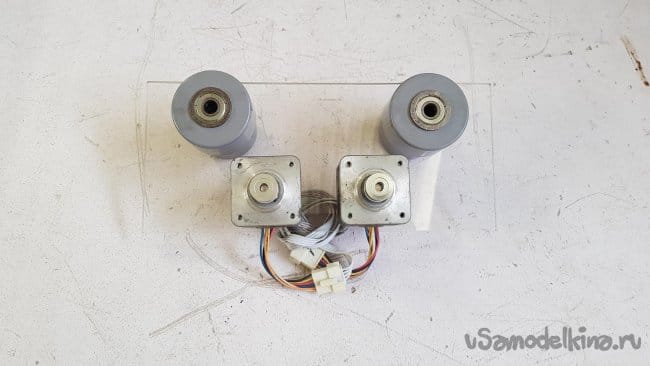
Ролики-держатели тороида

Это ролик, вращающий катушку, и одновременно удерживающий её. Я выточил их из нейлонового стержня на моём токарном мини-станке. Все размеры приведены на фото.
Читайте также: Мотор для катера лодки
Ролики я снабдил поролоновой лентой, она хорошо держит катушку и та не проскальзывает. Важно использовать барашковые гайки для закрепления направляющих – обычные от вибрации откручиваются.

Сверху и снизу каждого ролика я поставил по фланцевому подшипнику.
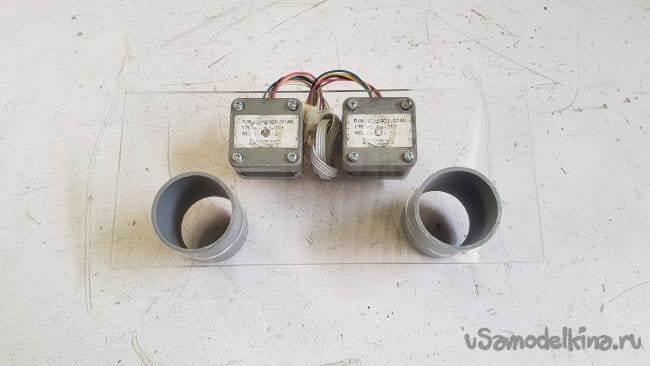
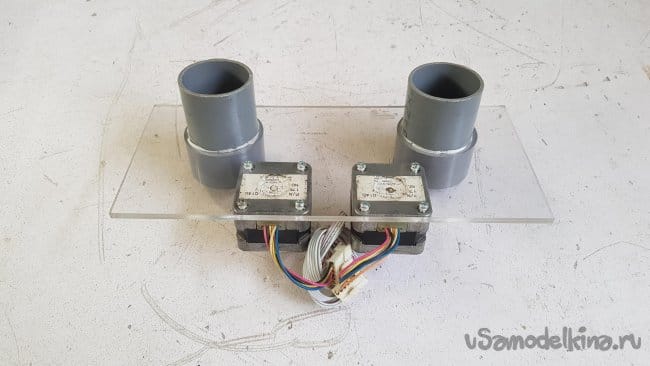
Крепление шагового двигателя

Так я закрепил шаговый двигатель, NEMA17. Он вращает катушку, что позволяет автоматически наматывать проволоку по всей её окружности и не требует ручного вращения.
Двигатель постоянного тока





Этот мотор вращает намоточное кольцо. Я использовал Orange Jhonson 12v Dc Motor 300 RPM. Вам советую взять мотор на 600 RPM или 1000 RPM.
Ремень имеет 600 мм в длину и 6 мм в ширину. Держатель мотора, крепящийся к алюминиевому профилю, также сделан из фанеры.
Инфракрасный датчик


Я использовал датчик от SeedStudio. Он отправляет сигнал на контакт обработки прерываний Arduino – таким образом Arduino может подсчитывать количество оборотов кольца.
Я закрепил датчик на алюминиевом профиле так, чтобы замок кольца заодно работал и отражающей поверхностью, на которую реагирует датчик.
Данный датчик выдаёт по 2 сигнала за один поворот кольца – когда дерево сменяется металлом, сигнал меняется с низкого напряжения на высокое, а потом наоборот. Обработчик прерываний регистрирует два изменения состояния. Поэтому для подсчёта реального количества поворотов мне пришлось делить количество срабатываний пополам.
Основание аппарата


Основание тоже сделано из фанеры 12 мм, имеет размеры 300х200 мм. Четыре резиновых ножки будут прочно и хорошо держать машину, и помогут избежать ненужной вибрации.
Для установки компонентов я закрепил на основании алюминиевый профиль. Обожаю его за гибкость в использовании. Все компоненты можно легко устанавливать на профиле и двигать вдоль него. Позволяет легко выравнивать компоненты относительно друг друга.
Корпус контроллера


Коробочка распечатана на 3D-принтере, внутрь установлены плата, ЖК-дисплей и энкодер. Корпус придаёт профессиональный вид всему проекту, а также обеспечивает удобную настройку аппарата. Корпус закреплён на основании при помощи металлической скобы.
Схема подключения
Видео:Станок для намотки катушекСкачать

Навигация в меню
ЖК-дисплей используется для вывода информации, а энкодер – для ввода.

Первый экран с приветствием.

На втором экране нужно ввести внешний диаметр катушки – аппарат поддерживает катушки разных диаметров.

На третьем экране нужно ввести количество витков.

На четвёртом экране нужно ввести угол покрытия катушки. 360° означает, что катушка будет покрыта проволокой целиком. 720° означает, что катушка будет обмотана проволокой дважды по окружности.

На 5-м экране можно проверить все входные данные пред тем, как запустить машину. Если всё верно, нажимаете на энкодер, и машина стартует.

6-й экран демонстрирует количество витков в реальном времени.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
- Правообладателям
- Политика конфиденциальности
Механика © 2023
Информация, опубликованная на сайте, носит исключительно ознакомительный характер📺 Видео
Намотка катушки проводом 0,032 мм 3000 витков. Намоточный станок СНП -0,1- 150В «Пульсар»Скачать

Автоматическая намотка статора трехфазного двигателя 74мм на станке МТ-405 Модестат.Скачать
Станок для намотки трансформаторов.Скачать
Станок для намотки катушек трансформаторов двигателей и дроселейСкачать
Намотка бифилярной катушки ( для пусковой обмотки 1 -но фазного двигателя)Скачать
Супер-Простой Намоточный станок. Своими руками! Очень просто! Часть 1.Скачать
Станок с ЧПУ для намотки эл катушекСкачать
Намотка медной ленты на тороидальный магнитопроводСкачать
Автоматический станок намотки статоров с помощью вращающейся головы ND-CY-305Скачать
Намотка катушки, СЕКРЕТОВ НЕТ!Скачать
ЧУДО СТАНОК для намотки трансформаторов и катушекСкачать
Намотка катушки статораСкачать
Станок для намотки всыпной обмотки электродвигателя - info@td-rer.ru, https://td-rer.ruСкачать
Самодельный станок для намотки катушек с раскладчиком витков, счетчиков и защитой от обрываСкачать
Станок намотки трансформаторов своими руками. Простая, но надежная моталка катушек трансформаторов.Скачать














