
На этом уровне находятся управляющие устройства – программируемые контроллеры ПЛК (PLC), промышленные компьютеры ПК (IPC) , связанные с датчиками и исполнительными механизмами непосредственно линиями связи или через промышленные шины, образуя распределенную систему управления (DCS). Они используются для управления объектами технологического процесса.
устройство, предназначенное для выполнения алгоритмов управления, записанных пользователем в виде программы в память контроллера. Принцип работы ПЛК заключается в сборе и обработке данных по программе пользователя с выдачей управляющих сигналов на исполнительные устройства. Программируемые логические контроллеры(Р rogramable Logic С ontroller ) применяются для решения задач автоматизации от управления несложными комплексами (автоматическими линиями, сортировки, разлива, упаковки, управление насосами, управление дверьми и воротами, системы обогрева и вентиляции, системы безопасности и сигнализации и др.) до решения задач автоматизации любой степени сложности с использованием мо щ ных контроллеров или промышленных компьютеров объединённых в единую систему
. Промышленный ПК ( Industrial Personal Computer , IPC ) предназначен для p аботы в производственных условиях в режиме реального времени, т.е. при возникновении какого-то случайного события должен незамедлительно реагировать на него, также отличается от обычного с пособность ю длительно работать в условиях повышенной вибрации, загрязнённости, перебоев в электропитании, в тяжелых температурных режимах . Поэтому должны иметь минимум движущихся частей, а желательно вообще обойтись без них, поэтому в последнее время жёсткие диски активно заменяются на SSD накопители, вентиляторы не применяются, и тепло отводится на наглухо закрытый корпус-радиатор, из-за чего стараются применять процессоры с минимальным TDP ( thermal design power — предельно потребляемая мощность) . Должны быть снабжены устройствами сопряжения с различными периферийными устройствами ( сканеры, панели HMI и др.) , иметь сторожевой таймер (watchdog), позволяющего машине самостоятельно перезагружаться при зависании.
Управляющие контроллеры и компьютеры выпускают много таких известных мировых фирм , как SIEMENS, OMRON, MITSUBISHI, ROCWELL AUTOMATION, SNEIDER ELECTRIC, ABB и др.
Примеры приведены на Рис. 40

Рис. 4 0 Разновидности промышленных контроллеров и компьютеров.
Структурная схема Рис. 4 1 показывает из каких модулей состоит контроллер и которые связаны между собой системными шинами. К клеммам входного модуля подключаются кнопки управления (»Старт» ,»Стоп» , »Реверс» и др.) и датчики измеряющие параметры в обьекте управления (температура, давление, расход и др.). Сигнал с датчика может быть бинарным (0, 1) или цифровым в виде последовательности импульсов. Если сигнал датика аналоговый, то датчик подключают через добавочный модуль или встроенный модуль, преобразующий аналоговый сигнал в цифровой- АЦП. Микропроцессорный модуль ( CPU- Central Processor Unit) состоит из микропроцессора и памяти. Процессор организует и согласует работу всех модулей контроллера, производит логические и арифметические операции над переменными, получаемыми от входного модуля и записанными в память, обеспечивает операции коммуникации контроллера с внешними устройствами через сетевой интерфейс. Память контроллера секционирована, т.е разделена на области для различных переменных, что упрощает его программирование. К клеммам выходного модуля подключаются исполнительные механизмы ( реле, контакторы, электро- пневмо- гидроприводы, сигнальные устройства и др.) Выходные сигналы могут быть бинарными или цифровыми. Если для управления ИМ нужен аналоговый сигнал, то применяют цифро- аналоговый преобразователь ЦАП.
Блоки расширения подключают в том случае, если нужно увеличить число входов и выходов для управления большим числом параметров. Сетевой интерфейс связывает контроллер, через промышленные шины, с другими устройствами автоматизированной системы. Модем применяют при осуществлении беспроводной дистанционной связи с внешними устройствами. С помощью компьютера, который подсоединен к контроллеру через устройство связи УС, в память контроллера записывается программа пользователя с алгоритмом, описывающим процесс управления управляемым технологическим обьектом.

Рис. 4 1 Структурная схема контроллера (рисунок автора).
Контроллер работает циклически и его рабочий цикл (цикл сканирования) разделён на фазы, которые выполняются последовательно. Пройдя все фазы, цикл повторяется и число циклов в секунду зависит от скорости процессора и длины программы. Для разных контроллеров число фаз цикла может быть разным. На Рис.4 2 . показаны фазы для контроллера SIMATIC.

Рис.4 2 . Цикл сканирования (рабочий цикл) программируемого контроллера (рисунок автора).
Читайте также: Легкосплавные диски 6j x 15 matone шины 195 55 r15
1.Чтение входов( сигналы с датчиков): PLC копирует состояние физических входов в регистр входов, в памяти входов формируется цифровой образ процесса.
2.Выполнение логики управления в программе пользователя: процессор выполняет команды программы и сохраняет промежуточные значения в различных областях памяти. Новые состояния выходов записываются в регистр выходов.
3.Обработка коммутационннх запросов на обмен данными: процессор выполняет все задачи, необходимые для обмена данными.
4.Самодиагностика CPU: процессор проверяет физическое состояние блоков контроллера, напряжение в блоке памяти, время выполнения отдельных приказов, а также контролирует события, связанные с ходом выполнения кадра сканирования.
5.Запись в выходы: Значения, хранящиеся в регистре выходов образа процесса, записываются в физические выходы, обеспечивая передачу управляющих команд на исполнительные механизмы.
Длительность цикла сканирования зависит от скорости процессора, количества задействованых входов и выходов, от длины программы. Если смена состояния одного или нескольких входов произойдёт в течении цикла сканирования и длительность импульса с датчика, фиксирующего смену состояния датчика, будет короче цикла, то PLC может не среагировать на него. Для исключения этого, например, в контроллерах SIMATIC имеется функция – ´»Регистратор импульсов» (Pulse Catch Bits — Биты регистратора импульсов), которую можно включить в системном блоке. Если функция «Регистратор импульсов» активизирована для некоторого входа, то изменение сигнала на этом входе фиксируется и удерживается, пока не произойдет обновление данных в следующем цикле. Таким образом время реакции контроллера (время от возникновения входного сигнала до момента активизации выхода) не превышает длительности одного цикла сканирования. Это поясняет Рис.4 3 .
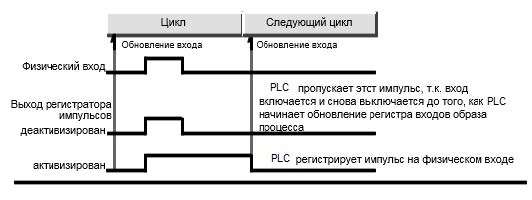
Рис.4 3 Работа PLC с деактивированным и активированным регистратором.
Источник: SIEMENS SIMATIC Программируемый контроллер S7-200 Системное руководство.
При контроллера учитываются его технические, эксплуатационные и потребительские характеристики. Технические и эксплуатационные характеристики задаются техническими условиями и требованиями конкретного производства, а они являются определяющими. Выбрав по ним подходящие контроллеры, оценивают потребительские свойства, которые показывают соотношение показателей затраты/производительность/ надежность . Методика выбора контроллера по оценочным критериям приведена на Рис. 4 4 .
Для одних потребительских свойств их увеличение (>) , а для других их уменьшение ( и противоположен, т.е. уменьшение одного приводит к увеличению другого и, при сопоставлении, делают оптимальный выбор.

Рис. 4 4 Критерии оценки программируемых контроллеров.
Так как контроллеры непосредственно управляют технологическим процессом, то отказ в их работе может привести к нарушению хода процесса, экономическим потерям, а то и трагическим последствиям, поэтому во избежание этого, должны выполняться определённые требования по технике безопасности.
Требования к аппаратной части
1.Выдерживать условия эксплуатации (температура, влажность, запылённость, механические нагрузки). Современные промышленные контроллеры могут работать в температурных условиях от 0 до 65 °С, при влажности до 95-98% и большой запылённости.
2.Надежность. Наработка на отказ до 10-12 лет. .
3.Возможность полного аппаратного резервирования. Особенно для сложных производсв, где отказоустойчивость критична (химия, нефтехимия, металлургия и др.).
4.Монтаж и подключение контроллера должен быть выполнен качественно и только квалифицированным персоналом, имеющим соответствующие допуски. Ошибки во внешних электрических цепях контроллеров, некорректный расчет устройств питания и силовых блоков, некачественное заземление, неправильно выполненная система аварийного отключения, отсутствие защиты механических узлов и прочие нарушения правил монтажа могут привести к тяжелым последствиям.
5.Возможность обеспечения бесперебойного питания на случай выхода из строя сети питания контроллера.
6.Возможность отключения с блокировкой оборудования и программы.
Требования к программному обеспечению
7.Применять программное обеспение производителя обеспечивающее требования безопасности на данном производстве. Программа управления должна быть составлена грамотным специалистом. Ошибки в прикладном программном обеспечении PLC способны приводить к потере синхронности работы механизмов, что может стать причиной их поломки или привести к травмам обслуживающего персонала. Правильно спроектированная система должна содержать элементы блокировки, исключающие такую возможность и выявление ошибок автоматически должно сопровождаться переводом технологического оборудования в безопасные состояния.
1.Системы повышенной надежности (H-системы) — резервированные системы.Суть построения H-системы в принципе горячего резервирования с поддержкой безударного автоматического переключения на резервный базовый блок в случае отказа ведущего базового блока. В нормальном режиме оба базовых блока находятся в активном состоянии и синхронно выполняют одну и ту же программу и синхронно формируют управляющие воздействия, но эти воздействия выдаются через модули вывода только из ведущего блока. В случае возникновения отказа все функции управления принимает на себя исправный блок контроллера.
Читайте также: Оснастка для шин направляющих

Рис.4 5 . Резервированная система : S7-400H
Резервированные системы автоматизации (H-системы) повышают надежность функционирования системы управления и снижают вероятность остановки производства.
2.Системы повышенной безопасности (F-системы) Программируемые контроллеры повышенной безопасности (F-системы) предназначены для построения систем безопасного управления, в которых возникновение отказов не влечет за собой появление опасности для жизни обслуживающего персонала и не приводит к загрязнению окружающей природной среды. Эта система обеспечивает повышенную надежность функционирования автоматики безопасности за счёт резервирования; при возникновении отказов приводит к переводу технологического оборудования в безопасные состояния и остановке производственного процесса. Реализация функций безопасного управления поддерживается программами безопасного управления (F- программами) центральных процессоров, а также специальными сигнальными модулями (F-модулями), позволяющими создавать различные конфигурации систем ввода-вывода.

Рис. 4 6 . S7-400F: система безопасного управления
Стандартные функции связи и функции F-связи между программируемым контроллером и станциями распределенного ввода-вывода ET 200M реализуются через сеть PROFIBUS-DP. Для передачи данных F-систем в сети PROFIBUS используется специальный профиль PROFISafe.
На основе программируемых контроллеров S7-400®F/FH и S7-300®Fмогут создаваться системы безопасного управления, отвечающие требованиям:
— Классов AK1 … AK6 по DIN V 19250/ DIN V VDE 0801*.
— Классов SIL 1 … SIL 3 по IEC 61508*.
— Категорий 1 … 4 по EN 954-1*.
1. Назовите основные функции уровня управления.
2. Применение PLC и его особенности .
3. Особенности промышленных компьютеров( IPC) по сравнению с обычными.
4. Рабочий цикл контроллера, его составляющие и длительность.
5. Что такое время реакции контроллера.
6. По каким характеристикам выбирается контроллер.
7. Перечислите требования по ТБ к аппаратной части контроллера.
8. Требования по ТБ к программной части контроллера. Что такое Н – системы и F – системы.
Структура и принципы работы системных шин
Системная шина процессора предназначена для обмена информацией микропроцессора с любыми внутренними устройствами микропроцессорной системы (контроллера или компьютера). В качестве обязательных устройств, которые входят в состав любой микропроцессорной системы, можно назвать ОЗУ, ПЗУ, таймер и порты ввода-вывода. Структурная схема простейшего микропроцессорного устройства приведена на рисунке 1.В состав системной шины в зависимости от типа процессора входит одна или несколько шин адреса, одна или несколько шин данных и шина управления. Несколько шин данных и адреса применяется для увеличения производительности процессора и используется только в сигнальных процессорах. В универсальных процессорах и контроллерах обычно применяется одна шина адреса и одна шина данных.В понятие шины вкладывают разное значение при рассмотрении различных вопросов. В простейшем случае под понятием шина подразумевают параллельно проложенные провода, по которым передаётся двоичная информация. При этом по каждому проводу передаётся отдельный двоичный разряд. Информация может передаваться в одном направлении, как, например, для шины адреса или шины управления, или в различных направлениях (для шины данных). По шине данных информация передаётся либо к процессору, либо от процессора в зависимости от операции записи или чтения, которую в данный момент осуществляет процессор.В любом случае все сигналы, необходимые для работы системной шины формируются микросхемой процессора как это рассматривалось при изучении блока обработки данных. Иногда для увеличения скорости обработки информации функции управления системной шины берёт на себя отдельная микросхема (например контроллер прямого доступа к памяти или сопроцессор). Арбитраж доступа к системной шине при этом осуществляет контроллер системной шины (в простейшем случае достаточно сигнала занятости шины).В некоторых случаях в понятие шина дополнительно включают требования по уровням напряжения, которыми представляются нули и единицы, передаваемые по её проводам. В состав требований могут быть включены длительности фронтов передаваемых сигналов, типы используемых разъёмов и их распайка, последовательность передаваемых сигналов и скорость их передачи.

Рисунок 1. Структурная схема подключения микропроцессорных устройств к системной шине.
При подключении различных устройств к системной шине возникает вопрос — как различать эти устройства между собой? Единственный способ сделать это использовать индивидуальный адрес для каждого устройства, подключенного к системной шине микропроцессора. Так как адресация производится к каждой ячейке устройства индивидуально, то возникает понятие адресного пространства, занимаемого каждым устройством и адресного пространства микропроцессорного устройства в целом.
Читайте также: Шины 185 70 r14 максис
Персональных компьютерах используются системные шины стандартов ISA, EISA, VLB и PSI
Системная шина ISA (Industry Standard Architecture) применяется начиная с процессора i80286. Гнездо для плат расширения включает основной 64-контактный и дополнительный 36-контактный разъемы. Шина 16-разрядная, имеет 24 адресные линии, обеспечивает прямое обращение к 16 Мбайт оперативной памяти. Количество аппаратных прерываний — 16, каналов DMA — 7. Допускается возможность синхронизации работы шины и процессора разными тактовыми частотами. Тактовая частота — 8 МГц. Максимальная скорость передачи данных — 16 Мбайт/с.
Для процессора i80386 с целью повышения производительности разработана шина EISA (Extended Industry Standard Architecture). Шина обеспечивает 32-разрядную передачу данных, в том числе в режиме DMA, улучшенную систему прерываний и арбитраж DMA, автоматическую конфигурацию системы и плат расширения, позволяет адресовать до 4 Гбайт памяти. Доступ к памяти имеет не только процессор, но и платы управляющих устройств типа bus-master (управляющие передачей данных по шине), и устройства, имеющие возможность организовать режим DMA. Стандарт поддерживает многопроцессорную архитектуру для «интеллектуальных» плат, оснащенных собственными микропроцессорами: данные от контроллеров дисков, графических и сетевых адаптеров обрабатываются независимо, не загружая основной процессор.
Максимальная скорость передачи данных — 33 Мбайт/с (в пакетном режиме). В стандартном режиме скорость такова же, как у шины ISA.
Разъем шины EISA — универсальный, допускается установка как EISA, так и обычных ISA плат расширения.
Контроллер DMA поддерживает 8-, 16- и 32-разрядные режимы передачи данных.
Тактовая частота шины — 8–10 МГц.
Компьютеры, использующие системные платы с шиной EISA, достаточно дорогие. В основном это мощные файл-серверы или рабочие станции.
Шина VLB (VESA Local Bus) предложена ассоциацией VESA (Video Electronics Standards Association). Она является расширением шины процессора и предназначена для работы с контроллерами накопителей и видеоадаптером. Цель разработки — увеличение быстродействия компьютера за счет повышения тактовой частоты работы периферийных устройств (до 33 МГц и выше).
спецификация шины — 32-разрядная, обеспечивает подключение до 3 периферийных устройств. Подключаемые устройства — контроллеры накопителей, видеоадаптеры, сетевые платы. Конструктивно VLB выглядит как короткий 112-контактный соединитель, установленный рядом с разъемом ISA. В нем 32 линии используются для передачи данных, 30 для передачи адреса. Максимальная скорость передачи данных по шине — 130 Мбайт/с.

спецификация — разработана после появления процессора Pentium. Предусмотрено использование 64-разрядной шины данных, увеличение количества разъемов расширения (3 на 40 МГц и 2 на 50 МГц). Скорость передачи данных возросла до 400 Мбайт/с.
Шина PCI (Peripherals Connection Interface) разработана фирмой Intel. В отличие от VLB, она может использоваться вне зависимости от типа процессора и в иных компьютерных платформах. Эта шина является стандартом для систем на базе Pentium. К шине подключается до 10 устройств. Шина работает на фиксированной частоте 33 МГц, обеспечивает режим автоконфигурации PnP (Plug and Play). Шина использует 124-контактный (32-разрядная) или 188-контактный разъем (64-разрядная передача данных). Скорость обмена — до 264 Мбайт/с. Спецификация PCI 2.1 обеспечивает работу с частотой 66 МГц и скорость обмена до 520 Мбайт/с.
Современные конфигурации На материнских платах с процессором Pentium обычно устанавливают 3 ISA и 4 PCI разъема плат расширения. С совершенствованием системных плат и переходом к новым типам процессоров количество слотов ISA уменьшается, а слотов PCI возрастает. Все большее количество плат расширения переводится с медленной шины ISA на быструю PCI. Например, на системной плате S1837UANG Thunderbolt, выпущенной в 1999 г. предусмотрены 1 слот расширения шины ISA и 6 слотов шины PCI. В ближайшей перспективе, по завлениям разработчиков системных плат, полный отказ от шины ISA и переход на шину PCI.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле