
В связи и передачи данных , последовательная связь представляет собой процесс отправки данных один бит за один раз, последовательно, по каналу связи или шине компьютера . Это контрастирует с параллельной связью , когда несколько битов передаются целиком по каналу с несколькими параллельными каналами.
Последовательная связь используется для всей дальней связи и большинства компьютерных сетей , где стоимость кабеля и трудности с синхронизацией делают параллельную связь непрактичной. Последовательные компьютерные шины становятся все более распространенными даже на более коротких расстояниях, поскольку улучшенная целостность сигнала и скорость передачи в новых последовательных технологиях начали перевешивать преимущество параллельной шины в простоте (отсутствие необходимости в сериализаторе и десериализаторе или SerDes ) и превзойти ее недостатки ( перекос часов , плотность межсоединений). Переход от PCI к PCI Express является примером.
- Кабели
- Серийные автобусы
- Последовательный или параллельный
- Шина I2C. Основные понятия
- Связь через алфавитную кашу
- Много названий, а шина одна
- Выглядит, как попытка обсудить что-то важное в комнате, полной людей.
- Обзор
- I2C против UART и SPI
- Заключение
- Шины и протоколы в промышленной автоматике: как всё это работает
- Нижний уровень или полевая шина — то, с чего всё начинается
- Верхний уровень: от гирлянды до целой рабочей станции
- «Древние» протоколы передачи данных: Modbus и HART
- Второе поколение протоколов или не совсем промышленные шины ISA, PCI(e) и VME
- Как работают современные промышленные шины и протоколы
Кабели
Многие системы последовательной связи изначально были разработаны для передачи данных на относительно большие расстояния через какой-то кабель для передачи данных .
Практически при любой междугородной связи данные передаются побитно, а не параллельно, поскольку это снижает стоимость кабеля. Кабели, по которым передаются эти данные (кроме «последовательного» кабеля), и компьютерные порты, к которым они подключаются, обычно имеют более конкретное имя, чтобы избежать путаницы.
Кабели и порты клавиатуры и мыши почти всегда последовательны — например, порт PS / 2 , Apple Desktop Bus и USB .
Кабели, по которым передается цифровое видео, почти всегда являются последовательными, например, коаксиальный кабель, подключенный к порту HD-SDI , веб-камера, подключенная к порту USB или Firewire , кабель Ethernet, соединяющий IP-камеру с портом Power over Ethernet , FPD-Link , так далее.
Другие такие кабели и порты, передающие данные по одному биту, включают Serial ATA , Serial SCSI , кабель Ethernet, подключенный к портам Ethernet , канал данных дисплея с использованием ранее зарезервированных контактов разъема VGA или порта DVI или порта HDMI .
Серийные автобусы
Многие системы связи, как правило, были разработаны для соединения двух интегральных схем на одной печатной плате , соединенных сигнальными дорожками на этой плате (а не внешними кабелями).
Интегральные схемы дороже, чем больше контактов. Чтобы уменьшить количество выводов в корпусе, многие ИС используют последовательную шину для передачи данных, когда скорость не важна. Некоторые примеры таких недорогих последовательных шин включают RS-232 , SPI , I²C , UNI / O , 1-Wire и PCI Express .
Последовательный или параллельный
Каналы связи, по которым компьютеры (или части компьютеров) взаимодействуют друг с другом, могут быть последовательными или параллельными. Параллельный канал передает несколько потоков данных одновременно по нескольким каналам (например, по проводам, дорожкам печатной схемы или оптическим волокнам); тогда как по последовательному каналу передается только один поток данных.
Хотя последовательный канал может показаться хуже параллельного, поскольку он может передавать меньше данных за такт, часто бывает так, что последовательные каналы могут синхронизироваться значительно быстрее, чем параллельные каналы, чтобы достичь более высокой скорости передачи данных. Несколько факторов позволяют синхронизировать серийный номер с большей частотой:
- Часы перекос между различными каналами не является проблемой (для unclocked асинхронных последовательных коммуникационных связей).
- Последовательное соединение требует меньшего количества соединительных кабелей (например, проводов / волокон) и, следовательно, занимает меньше места. Дополнительное пространство позволяет лучше изолировать канал от окружающей среды.
- Перекрестные помехи представляют меньшую проблему, потому что поблизости меньше проводников.
- Бюджеты на энергопотребление, рассеивание мощности, стоимость кабеля, стоимость компонентов, площадь кристалла ИС, площадь печатной платы, защиту от электростатического разряда и т. Д. Могут быть сосредоточены на одном канале.
Во многих случаях последовательное соединение дешевле, чем параллельное. Многие ИС имеют последовательные интерфейсы, а не параллельные, поэтому они имеют меньше контактов и, следовательно, менее дороги.
Шина I2C. Основные понятия
В данной статье рассматриваются основные характеристики и преимущества протокола последовательной связи I2C (Inter-Integrated Circuit).
Связь через алфавитную кашу
Неудивительно, что общей особенностью электронных систем является необходимость обмена информацией между двумя или тремя или десятью отдельными компонентами. Инженеры разработали ряд стандартных протоколов, которые помогают различным микросхемам успешно общаться, что становится очевидным, когда вы сталкиваетесь с потоком сокращений в разделе «Связь» в списке характеристик микроконтроллера или сигнального процессора: UART, USART, SPI, I2C, CAN. Каждый протокол имеет свои плюсы и минусы, и важно немного знать о каждом из них, чтобы вы могли принимать обоснованные решения при выборе компонентов или интерфейсов.
Эта статья посвящена шине I2C, которая обычно используется для связи между отдельными интегральными микросхемами, расположенными на одной печатной плате. Два других распространенных протокола, которые также входят в эту основную категорию – это UART (универсальный асинхронный приемник/передатчик) и SPI (последовательный периферийный интерфейс). Вам необходимо знать основные характеристики I2C, прежде чем вы сможете полностью понять сравнение этих трех интерфейсов, поэтому обсудим эту тему в конце статьи.
Много названий, а шина одна
Нет сомнений в том, что протокол I2C страдает серьезной терминологической проблемой. Фактическое название – шина Inter–Integrated Circuit. Самая простая и, вероятно, наименее распространенная аббревиатура – IIC. Возможно, эту аббревиатуру недолюбливали из-за того, что две заглавные буквы I выглядят как две единицы, или как две строчных буквы l , или как римская цифра II , или как символ параллельных прямых. В любом случае аббревиатура I 2 C (произносится как «I в квадрате C») приобрела популярность, несмотря на сомнительную логику обращения с обычной буквой, как если бы она была переменной, подверженной возведению в степень. Третий вариант – I2C («I два C»), который позволяет избежать неудобств форматирования верхнего индекса, а также несколько легче в произношении, чем «I в квадрате C»
Дополнительная путаница вносится, когда вы замечаете, что SMB или SMBus явно используется в качестве еще одного способа обращения к шине I2C. Фактически эти сокращения относятся к шине управления системой SMB (System Management Bus), которая отличается, хотя и почти идентична, от шины I2C. Оригинальный протокол I2C был разработан компанией Phillips Semiconductor, а спустя годы Intel определил протокол SMBus как расширение I2C. Эти две шины в значительной степени взаимозаменяемы; если вас интересуют незначительные отличия между ними, то смотрите страницу 57 спецификации шины управления системой SMB.
Читайте также: Давление шин зимой 15 радиуса
Выглядит, как попытка обсудить что-то важное в комнате, полной людей.
Чтобы оценить ловкие технические приемы, которые делают I2C настолько эффективной, вам нужно подумать о трудностях достижения надежной, но универсальной связи между несколькими независимыми компонентами. Ситуация достаточно проста, если у вас есть одна микросхема, которая всегда является ведущей (master), и одна микросхема, которая всегда является ведомой (slave). Но что, если у вас есть несколько ведомых? Что если ведомые не знают, кто ведущий? Что, если у вас есть несколько ведущих? Что произойдет, если ведущий запросит данные у ведомого устройства, которое по какой-то причине перестало функционировать? Или что, если ведомый перестал функционировать в середине передачи? Что делать, если ведущий утверждает, что шина осуществляет передачу, а затем он выйдет из строя, прежде чем освободить шину?
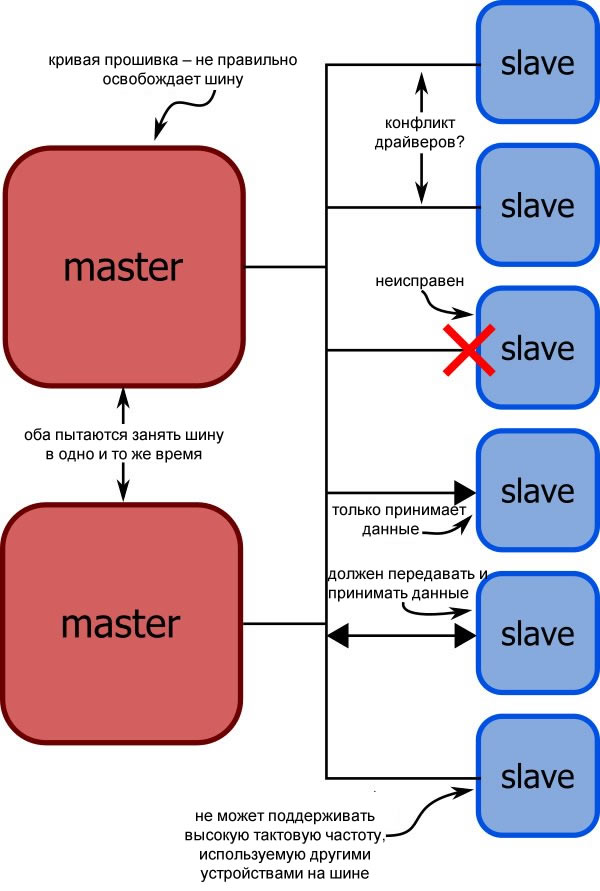
Возможные проблемы на шине
Дело в том, что в системе связи такого типа есть много вещей, которые могут пойти не так. Вы должны помнить об этом, когда будете изучать I2C, потому что в противном случае этот протокол будет казаться невыносимо сложным и перегруженным. Дело в том, что эта дополнительная сложность – это то, что позволяет I2C обеспечивать гибкую, расширяемую, надежную и низкоуровневую последовательную связь.
Обзор
Прежде чем вдаваться в детали, давайте рассмотрим ключевые характеристики I2C:
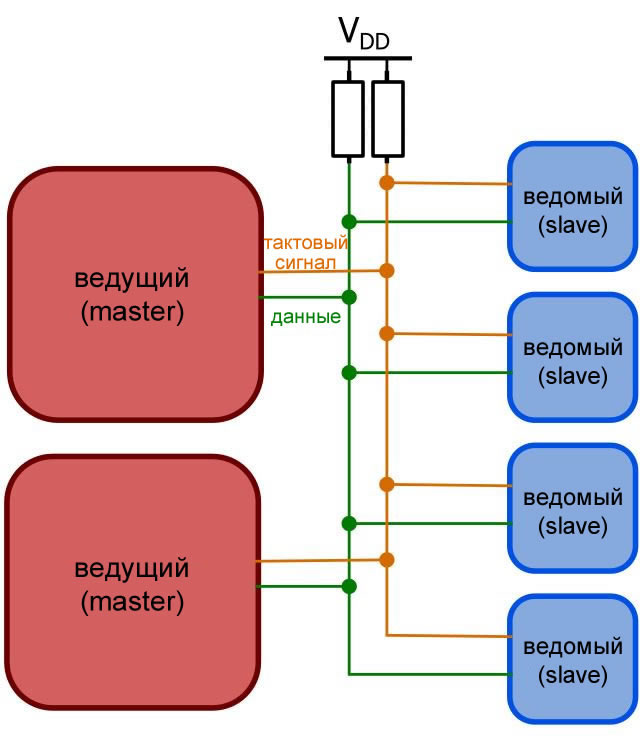
Шина I2C
- Используется только два сигнала (тактовая синхронизация и данные) независимо от токо, сколько устройство подключено к шине.
- Оба сигнала подтягиваются к положительному напряжению питания через резисторы, соответствующих номиналов.
- Каждое устройство взаимодействует с сигналами данных и тактовой синхронизации через драйверы вывода с открытым стоком (или с открытым коллектором).
- Каждое ведомое устройство идентифицируется с помощью 7-битного адреса; устройство мастер должно знать эти адреса, чтобы общаться с конкретным ведомым устройством
- Все передачи инициируются и прекращаются мастером; масте может передавать данные одному или нескольким ведомым устройствам или запрашивать данные из ведомого устройства.
- Метки «ведущий/master» и «ведомый/slave» по своей сути непостоянны: любое устройство может функционировать и как ведущее, и как ведомое устройство, если оно содержит необходимое аппаратное и/или программное обеспечение. На практике, однако, встраиваемые системы часто используют архитектуру, в которой одни мастер отправляет команды или собирает данные с нескольких ведомых устройств.
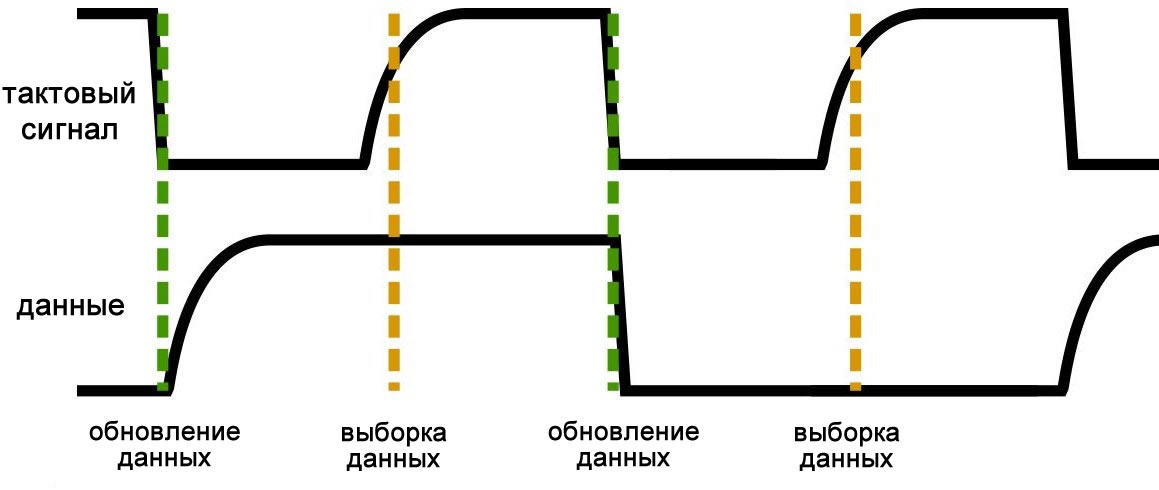
- Сигнал данных обновляется по заднему фронту тактового сигнала, а его выборка происходит по переднему фронту следующим образом: Временная диаграмма сигналов шины I2C
- Данные передаются в однобайтовых секциях, причем каждый байт сопровождается однобитным сигналом подтверждения, называемым битом ACK/NACK (подтверждение или неподтверждение).
I2C против UART и SPI
Преимущества I2C можно резюмировать следующим образом:
- требует малое количество выводов/сигналов даже с большим количеством устройств на шине;
- адаптируется к потребностям разных ведомых устройств;
- легко поддерживает несколько ведущих устройств;
- включает в себя функционал ACK/NACK для улучшения обработки ошибок.
А вот некоторые недостатки:
- увеличивает сложность программного или низкоуровневого аппаратного обеспечения;
- навязывает накладные расходы протокола, что снижает пропускную способность;
- требует подтягивающих резисторов, которые
- ограничивают тактовую частоту;
- занимают полезное место на печатной плате в системах, ограниченных по размеру;
- увеличивают рассеиваемую мощность.
С этих точек зрения видно, что I2C особенно подходит, когда у вас сложная, разнообразная или обширная сеть связанных устройств. Интерфейсы UART обычно используются для соединений «точка-точка», потому что не имеют стандартного способа адресации различных устройств и совместного использования линий связи. SPI отлично работает, когда у вас есть одно ведущее и несколько ведомых устройств, но для каждого ведомого устройства требуется отдельный сигнал выбора ведомого, что приводит к большому количеству линий связи и к трудностям разводки печатной платы, когда на шине находится много устройств. И SPI неудобен, когда вам нужно поддерживать несколько ведущих устройств.
Возможно, вам придется сознательно избегать I2C, если пропускная способность является приоритетом; SPI поддерживает более высокие частоты тактового сигнала и минимизирует накладные расходы. Кроме того, разработка низкоуровнего аппаратного обеспечения для SPI (или UART) намного проще, поэтому, если вы работаете с FPGA и разрабатываете свой последовательный интерфейс с нуля, I2C, вероятно, стоит выбирать последним.
Заключение
Мы рассмотрели основные характеристики I2C, и теперь мы достаточно хорошо знаем о преимуществах и недостатках этого протокола, чтобы принять обоснованное решение о том, какую последовательную шину выбрать для какого-то конкретного приложения. В будущих статьях мы рассмотрим протокол и как его реализовать более подробно.
Шины и протоколы в промышленной автоматике: как всё это работает
Наверняка многие и вас знают или даже видели, каким образом управляются большие автоматизированные объекты, например, атомная станция или завод со множеством технологических линий: основное действо часто происходит в большой комнате, с кучей экранов, лампочек и пультов. Это комплекс управления обычно называется ГЩУ — главный щит управления для контроля за производственным объектом.
Наверняка вам было интересно, как всё это работает с точки зрения аппаратной и программной части, и какие там используются протоколы передачи данных. В этой статье мы разберемся, как различные данные попадают на ГЩУ, как подаются команды на оборудование, и что вообще нужно, чтобы управлять компрессорной станцией, установкой производства пропана, линией сборки автомобиля или даже канализационно-насосной установкой.
Нижний уровень или полевая шина — то, с чего всё начинается
Этот неясный для непосвященных набор слов используется, когда нужно описать средства общения устройств управления с подведомственным оборудованием, например, модулями ввода-вывода или измерительными устройствами.
Под устройствами управления мы подразумеваем ПЛК, т.е. программируемые логические контроллеры (англ. PLC), или ПКА, т.е. программируемые контроллеры автоматизации (англ. PAC). Между ПЛК и ПКА есть некоторые различия, однако, в рамках данной статьи они не существенны, поэтому для упрощения будем использовать общий термин «контроллер».
Читайте также: Пластиковые шины для иммобилизации конечностей
В русскоязычном сообществе асушников канал общения между контроллером и другими устройствами обычно называют «полевой шиной», потому что он отвечают за передачу данных, которые приходят с «поля».
«Поле» — это глубокий профессиональный термин, обозначающий тот факт, что некое оборудование (например, датчики или исполнительные механизмы), с которым взаимодействует контроллер, находятся где-то далеко-далеко, на улице, в полях, под покровом ночи. И неважно, что датчик может быть расположен в полуметре от контроллера и измерять, допустим, температуру в шкафу автоматики, все равно считается, что он находится «в поле». Чаще всего сигналы с датчиков, приходящие в модули ввода-вывода все-таки преодолевают расстояния от десятков до сотен метров (а иногда и больше), собирая информацию с удаленных площадок или оборудования. Собственно, поэтому шина обмена, по которой контроллер получает значения с этих самых датчиков, называется обычно полевой шиной или реже шиной нижнего уровня или промышленной шиной.
Тут следует отметить, что в Европе и США полевым уровнем считаются только сами устройства, расположенные «в поле», но не среда передачи данных. В российских реалиях термин «полевая шина» или «шина нижнего уровня», пожалуй, слегка размыт и обозначает способ передачи данных от модулей ввода-вывода к контроллеру и наоборот.
Общая схема автоматизации промышленного объекта
Итак, электрический сигнал от датчика проходит некое расстояние по кабельным линиям (чаще по обычному медному кабелю с некоторым количеством жил), к которым подсоединяются несколько датчиков. Затем сигнал попадает в модуль обработки (модуль ввода-вывода), там он преобразуется в понятный контроллеру цифровой язык. Далее этот сигнал по полевой шине попадает непосредственно в контроллер, где и обрабатывается уже окончательно. На основе таких сигналов и строится логика работы самого контроллера. Существует и обратный путь: от контроллера команда управления по полевой шине попадает в модуль вывода, где преобразуется из цифрового вида в аналоговый и поступает по кабельным линиям к исполнительным механизмам и различным устройствам (на схеме выше не указаны).
Верхний уровень: от гирлянды до целой рабочей станции
Верхним уровнем называют все то, к чему может прикасаться обычный смертный оператор, который управляет технологическим процессом. В простейшем случае верхний уровень представляет собой набор лампочек и кнопочек. Лампочки сигнализируют оператору о неких происходящих событиях в системе, кнопочки служат для подачи команд контроллеру. Такую систему часто называют «гирлянда» или «ёлка», потому что выглядит очень похоже (как можно убедиться по фотографии в начале статьи).
Если оператору повезло больше, то в качестве верхнего уровня ему достанется панель оператора — некий плоскопанельный компьютер, который тем или иным образом получает данные для отображения от контроллера и выводит их на экран. Такая панель обычно монтируется на сам шкаф автоматики, поэтому взаимодействовать с ней приходится, как правило, стоя, что вызывает неудобства, плюс качество и размер изображения — если это малоформатная панелm — оставляет желать лучшего.

Ну и, наконец, аттракцион невиданной щедрости — рабочая станция (а то и несколько дублирующих), представляющая собой обычный персональный компьютер.
Для наглядного отображения информации на рабочих станциях и плоскопанельных компьютерах используют специализированное программное обеспечение — SCADA-системы. На человеческий язык SCADA переводится как система диспетчерского управления и сбора данных. Она включает в себя множество компонентов, таких как человеко-машинный интерфейс, визуализирующий технологические процессы, систему управления этими процессами, систему архивирования параметров и ведение журнала событий, систему управления тревогами и т.д. Всё это дает оператору полноценную картину происходящих на производстве процессов, а также возможность ими управлять и оперативно реагировать на отклонения от технологического процесса.
Оборудование верхнего уровня обязано взаимодействовать неким образом с контроллером (иначе зачем оно нужно?). Для такого взаимодействия используются протоколы верхнего уровня и некая технология передачи, например, Ethernet или UART. В случае с «ёлкой» таких изощрений, конечно, не нужно, лампочки зажигаются с использованием обычных физических линий, никаких мудреных интерфейсов и протоколов там нет.
В общем-то, этот верхний уровень менее интересен, нежели полевая шина, поскольку этого верхнего уровня может вообще не быть (из серии нечего там смотреть оператору, контроллер сам разберется, что и как нужно делать).
«Древние» протоколы передачи данных: Modbus и HART
Мало кто знает, но на седьмой день создания мира Бог не отдыхал, а создавал Modbus. Наравне с HART-протоколом, Modbus, пожалуй, самый старый промышленный протокол передачи данных, он появился аж в 1979 году.
В качестве среды для передачи изначально использовался последовательный интерфейс, затем Modbus реализовали поверх TCP/IP. Это синхронный протокол по схеме «мастер-слейв» (главный-подчиненный), в котором используется принцип «запрос-ответ». Протокол довольно тяжеловесный и медленный, скорость обмена зависит от характеристик приемника и передатчика, но обычно счет идет чуть ли не на сотни миллисекунд, особенно в реализации через последовательный интерфейс.
Более того, регистр передачи данных Modbus является 16-битным, что сразу же накладывает ограничения на передачу типов real и double. Они передаются либо по частям, либо с потерей точности. Хотя Modbus до сих пор повсеместно используется в случаях, когда не нужна высокая скорость обмена и потеря передаваемых данных не критична. Многие производители различных устройств любят расширять протокол Modbus своим исключительным и очень оригинальным образом, добавляя нестандартные функции. Поэтому данный протокол имеет множество мутаций и отклонений от нормы, но все же до сих пор успешно живет в современном мире.
Протокол HART тоже существует с восьмидесятых годов, это промышленный протокол обмена поверх двухпроводной линии токовой петли, в которую напрямую включаются датчики 4-20 мА и другие приборы с поддержкой протокола HART.Читайте также: Норма давления в шинах форд куга
Для коммутации линий HART используются специальные устройства, так называемые HART-модемы. Также существуют преобразователи, которые на выходе предоставляют пользователю уже, допустим, протокол Modbus.
Примечателен HART, пожалуй, тем, что помимо аналоговых сигналов датчиков 4-20 мА в цепи передается и цифровой сигнал самого протокола, это позволяет соединить цифровую и аналоговую часть в одной кабельной линии. Современные HART-модемы могут подключаться в USB-порт контроллера, соединяться по Bluetooth, либо же старинным способом через последовательный порт. Десяток лет назад по аналогии с Wi-Fi появился и беспроводной стандарт WirelessHART, работающий в диапазоне ISM.
Второе поколение протоколов или не совсем промышленные шины ISA, PCI(e) и VME
На смену протоколам Modbus и HART пришли не совсем промышленные шины, такие как ISA (MicroPC, PC/104) или PCI/PCIe (CompactPCI, CompactPCI Serial, StacPC), а также VME.
Настала эра вычислителей, имеющих в своем распоряжении универсальную шину передачи данных, куда можно подключать различные платы (модули) для обработки некоего унифицированного сигнала. Как правило, в этом случае процессорный модуль (вычислитель) вставляется в так называемый каркас, который обеспечивает взаимодействие по шине с другими устройствами. Каркас, или, как его любят называть трушные автоматизаторы, «крейт», дополняется необходимыми платами ввода-вывода: аналоговыми, дискретными, интерфейсными и т.д., либо все это слепливается в виде бутерброда без каркаса — одна плата над другой. После чего это многообразие на шине (ISA, PCI, etc.) обменивается данными с процессорным модулем, который таким образом получает информацию с датчиков и реализовывает некую логику.
Контроллер и модули ввода-вывода в каркасе PXI на шине PCI. Источник: National Instruments Corporation
Все бы ничего с этими шинами ISA, PCI(e) и VME, особенно для тех времен: и скорость обмена не огорчает, и расположены компоненты системы в едином каркасе, компактно и удобно, горячей замены плат ввода-вывода может и не быть, но пока еще и не очень хочется.
Но есть ложка дегтя, и не одна. Распределенную систему довольно сложно построить в такой конфигурации, шина обмена локальная, нужно что-то придумывать для обмена данными с другими подчиненными или равноправными узлами, тот же Modbus поверх TCP/IP или какой другой протокол, в общем, удобств маловато. Ну и вторая не очень приятная штука: платы ввода-вывода обычно ждут на вход какой-то унифицированный сигнал, и гальванической развязки с полевым оборудованием у них нет, поэтому нужно городить огород из различных модулей преобразования и промежуточной схемотехники, что сильно усложняет элементную базу.
Промежуточные модули преобразования сигнала с гальванической развязкой. Источник: DataForth Corporation
«А что с протоколом обмена по промышленной шине?» — спросите вы. А ничего. Нет его в такой реализации. По кабельным линиям сигнал попадает с датчиков на преобразователи сигналов, преобразователи выдают напряжение на дискретную или аналоговую плату ввода-вывода, а данные с платы уже читаются через порты ввода/вывода, средствами ОС. И никаких специализированных протоколов.
Как работают современные промышленные шины и протоколы
А что теперь? К сегодняшнему дню классическая идеология построения автоматизированных систем немного поменялась. Роль сыграли множество факторов, начиная с того, что автоматизировать тоже должно быть удобно, и заканчивая тенденцией на распределенные автоматизированные системы с удаленными друг от друга узлами.
Пожалуй, можно сказать, что основных концепций построения систем автоматизации на сегодняшний день две: локализованные и распределенные автоматизированные системы.
В случае с локализованными системами, где сбор данных и управление централизовано в одном конкретном месте, востребована концепция некоего набора модулей ввода-вывода, соединенных между собой общей быстрой шиной, включая контроллер со своим протоколом обмена. При этом, как правило, модули ввода-вывода включают в себя и преобразователь сигнала и гальваническую развязку (хотя, разумеется, не всегда). То есть конечному потребителю достаточно понять, какие типы датчиков и механизмов будут присутствовать в автоматизированной системе, сосчитать количество требуемых модулей ввода-вывода для разных типов сигналов и соединить их в одну общую линейку с контроллером. В этом случае, как правило, каждый производитель использует свой любимый протокол обмена между модулями ввода-вывода и контроллером, и вариантов тут может быть масса.
В случае распределенных систем справедливо все, что сказано в отношении локализованных систем, кроме этого, важно, чтобы отдельные компоненты, например, набор модулей ввода-вывода плюс устройство сбора и передачи информации — не очень умный контроллер, который стоит где-нибудь в будке в поле, рядом с краном, который перекрывает нефть, — могли взаимодействовать с такими же узлами и с главным контроллером на большом расстоянии с эффективной скоростью обмена.
Как разработчики выбирают протокол для своего проекта? Все современные протоколы обмена обеспечивают довольно высокое быстродействие, поэтому зачастую выбор того или иного производителя обусловлен не скоростью обмена по этой самой промышленной шине. Не так важна и реализация самого протокола, потому что, с точки зрения разработчика системы, это все равно будет черный ящик, который обеспечивает некую внутреннюю структуру обмена и не рассчитан на вмешательство извне. Чаще всего обращают внимание на практические характеристики: производительность вычислителя, удобство применения концепции производителя к поставленной задаче, наличие нужных типов модулей ввода-вывода, возможность горячей замены модулей без разрыва шины и т.д.
Популярные поставщики оборудования предлагают собственные реализации промышленных протоколов: например, всем известная компания Siemens разрабатывает свою серию протоколов Profinet и Profibus, компании B&R — протокол Powerlink, Rockwell Automation — протокол EtherNet/IP. Отечественное решение в этом списке примеров: версия протокола FBUS от российской компании Fastwel.
Есть и более универсальные решения, которые не привязаны к конкретному производителю, такие как EtherCAT и CAN. Мы подробно разберем эти протоколы в продолжении статьи и разберемся, какие из них лучше подходят для конкретных применений: автомобильной и аэрокосмической промышленности, производства электроники, систем позиционирования и робототехники. Оставайтесь на связи!
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле

