

Цифровое управление расположенным на плате источником питания повышает его КПД, снижает совокупную стоимость и расширяет возможности системы контроля. Приведенные ниже сведения, взятые из Белой книги, опубликованной компанией Ericsson, являются очень актуальными для Цифрового Питания.
Цифровые технологии в преобразовании энергии
Понятие «цифровое питание» (digital power) в последние годы привлекло к себе пристальное внимание и получило поддержку как поставщиков полупроводников, так и производителей источников питания. В связи с этим возникает необходимость разъяснить концепцию «цифрового питания», изучить и сравнить преимущества и компромиссы цифровых технологий с аналоговыми подходами, обсудить некоторые направления стандартизации, а также получить представление о его возможностях.
Цифровое питание определяется и реализуется различными поставщиками по-разному, более того, до сих пор не существует сколько-нибудь успешных крупномасштабных проектов, использующих цифровые подходы. В результате вокруг цифрового питания возникла атмосфера неопределенности и некоторой путаницы. Эффективна ли она по стоимости? Каковы ее характеристики в сравнении с обычными аналоговыми подходами? Надежна ли она? Не усложняет ли она процессы проектирования и внедрения? Требуются ли разработчики со специальными навыками? Насколько она «стандартизирована» и не возникнут ли проблемы со вторыми поставщиками?
Необходимо более комплексное определение процесса, обеспечивающего цифровую реализацию блоков и систем на основе цифрового питания. Самое главное, ответить на перечисленные вопросы так, чтобы конечный пользователь – системный интегратор или OEM-производитель – смог уверенно работать с цифровым питанием.
Почему преобразование энергии все еще находится, главным образом, в аналоговой области? Основная причина заключается в том, что первостепенное значение для большинства систем питания имеет эффективность. Независимо от того, сколько «свистков и колокольчиков» может добавить цифровая реализация, ее привлекательность будет ограниченной, если она снижает КПД. Увеличивающиеся «накладные расходы» в виде мощности, рассеиваемой дополнительными схемами цифрового управления, до самого последнего времени делали этот подход весьма непривлекательным.
Определенные проблемы связаны также со стоимостью и плотностью упаковки. К счастью, развитие цифровой технологии КМОП решило эти проблемы, предоставив возможности цифровой обработки сигналов при высокой плотности компоновки, незначительной рассеиваемой мощности и низкой стоимости.
Цифровое регулирование и управление
«Цифровое питание» – широкое понятие, включающее в себя несколько концепций и субдисциплин, предоставляющее конечному пользователю несколько различных уровней извлечения выгоды. Одной из основных особенностей цифрового питания является то, что для любого конкретного приложения конечный пользователь обычно выбирает лишь некоторое подмножество из всех доступных цифровых решений. Этот выбор будет основываться на факторах стоимости, сложности и доступности системы, а также на требованиях к техническому обслуживанию.
Одним из ключевых понятий является различие между регулированием питания и управлением питанием. Термин «регулирование питания» (power control) относится к функциям внутреннего управления в источнике питания и, прежде всего, к поцикловому управлению потоком энергии. Обратите внимание, что источник питания, использующий цифровые технологии управления, конечному пользователю будет казаться идентичным источнику, управляемому аналоговыми методами.
Термин «управление питанием» (power management) относится к функциям связи и/или регулирования за пределами одного или нескольких источников питания. Он включает такие функции, как конфигурирование системы питания, регулирование и обнаружение неисправностей. В настоящее время реализация этих функций, как правило, основана на сочетании аналоговых и цифровых методов. Цифровое управление питанием подразумевает, что все эти функции реализованы с помощью цифровых технологий и какой-либо шины передачи данных.
Регулирование источника питания
Классическая схема регулирования аналогового источника питания показана на Рисунке 1. В качестве основного элемента управления используется интегральная схема широтно-импульсного модулятора (ШИМ). Выходное напряжение источника питания измеряется на резистивном делителе напряжения и сравнивается усилителем ошибки с постоянным опорным напряжением.
| Рисунок 1. | Блок-схемы аналоговых и цифровых систем управления изображены вместе с некоторыми частями силовых цепей. |
Выходной сигнал усилителя ошибки используется схемой ШИМ для управления временем включения силового ключа.
Необходимая для достижения баланса между динамическим откликом и устойчивостью частотная компенсация петли ОС обычно реализуется внешней по отношению к микросхеме ШИМ цепью, состоящей из постоянного резистора и конденсатора.
Важными элементами источника питания являются также входной и выходной фильтры. Эти цепи, состоящие из катушек индуктивности, конденсаторов и резисторов, выполняют несколько функций. Входной фильтр помогает защитить источник питания от бросков входного напряжения, обеспечивает некоторый запас энергии для работы источника во время динамических изменений нагрузки и содержит фильтрующую схему, необходимую для выполнения требований по уровню излучаемых кондуктивных помех.
Читайте также: Ручной шиномонтаж грузовых шин своими руками
Выходной фильтр сглаживает пульсации и шумы выходного напряжения до заданных уровней и, кроме того, содержит накопитель энергии для компенсации динамических провалов тока в цепях нагрузки. Важно отметить, что входные и выходные фильтры, а также силовые устройства остаются, по существу, одинаковыми в источниках питания как с аналоговой, так и с цифровой структурой управления.
На Рисунке 1 показана структура типичной системы цифрового управления электропитанием.
Выходное напряжение измеряется так же, как и в аналоговых конструкциях. Однако напряжение с токоизмерительного резистора подается не на усилитель ошибки, а преобразуется в двоичный цифровой код с помощью АЦП. C выхода АЦП сигналы поступают на микроконтроллер, который производит их обработку. Для хранения алгоритмов управления микроконтроллера используется внутриплатное ПЗУ программ.
Эти алгоритмы позволяют микроконтроллеру выполнять ряд вычислений над сигналами цифровых выходов АЦП. Результатами этих вычислений являются такие величины, как сигнал ошибки, требуемые значения ширины импульсов для драйверов, оптимизированные величины задержки на различных выходах драйверов, а также параметры частотной компенсации петли регулирования. Внешние компоненты частотной компенсации, используемые в аналоговой системе, больше не нужны.
Все значения таких параметров, как выходное напряжение, выходной ток и температура либо записываются в EEPROM при изготовлении устройства, либо передаются по коммуникационной шине. При включении питания содержимое EEPROM выгружается в ОЗУ, которое затем микроконтроллер использует для операций чтения и записи.
Цифровое управление значительно гибче аналогового в своей способности адаптироваться к изменениям входного напряжения и тока нагрузки. Оно позволяет изменять параметры управления в зависимости от условий работы источника питания. Это иллюстрируется следующими примерами.
В синхронном понижающем источнике питания верхний и нижний MOSFET управляются таким образом, чтобы они никогда не оказывались одновременно в проводящем состоянии. Это гарантируется введением «мертвого времени» – временнóго интервала между выключением одного транзистора и включением другого. При цифровом управлении мертвое время не обязательно должно быть постоянным; для оптимизации КПД источника питания его можно менять в зависимости от условий работы с помощью цифрового контура управления. Как видно из Рисунка 2, эта технология особенно эффективна при малой нагрузке.
| Рисунок 2. | Такой параметр, как «мертвое время» в синхронном понижающем источнике питания для увеличения КПД может быть оптимизирован в соответствии с входным напряжением и током нагрузки. |
В аналоговых схемах управления частотная компенсация петли обратной связи представляет собой компромисс между устойчивостью и характеристиками динамического отклика. При цифровом управлении можно построить нелинейные или адаптивные контуры управления, изменяющие параметры компенсации в зависимости от условий работы. Таким образом, источник питания демонстрирует быструю реакцию, когда это необходимо, и медленный отклик в других ситуациях.
Примеры такого адаптивного поведения показаны на Рисунке 3. Помимо улучшенной динамической реакции этот подход дает системе питания и другие преимущества. Для поддержания заданного уровня пульсаций требуются выходные конденсаторы меньшей емкости, что позволяет сэкономить и на стоимости компонентов, и на площади печатной платы. Нелинейное управление также может использоваться для обеспечения работы источника в режиме прерывистой проводимости без присущих этому режиму плохих динамических характеристик.
| Рисунок 3. | Нелинейные или адаптивные контуры управления могут сочетать преимущества устойчивости и хорошей динамики. |
Ввиду перечисленных выше преимуществ цифровое управление в настоящее время является предпочтительным подходом, и постепенно все больше и больше будет использоваться в новых конструкциях источников питания. Дополнительный выигрыш дает тот факт, что некоторые из цифровых схем, встроенных в источники, могут использоваться для управления системой питания. Таким образом, бóльшая часть «железа», необходимого для управления питанием, которая будет описана в следующем разделе, достается разработчику системы «бесплатно».
Система управления питанием
Цифровое управление предоставляет ряд преимуществ и возможностей и может использоваться на нескольких различных этапах жизненного цикла источника питания и системы питания. Ключевым словом здесь является гибкость; разработчик системы питания может выбирать только те функции и возможности, которые важны для конкретного приложения:
- В процессе изготовления источника питания для подстройки напряжений и порогов срабатывания защиты, а также для загрузки кодов даты и индивидуальных номеров, может использоваться автоматизированное тестовое оборудование (ATE).
- При оптимизации конструкции системы питания цифровой интерфейс можно использовать для измерения температуры, напряжения и выходных токов, а также для установки порогов срабатывания цепей защиты от аварийных режимов.
- Цифровой интерфейс системы управления питанием может использоваться ATE во время сборки и тестирования платы и системы.
- Хост-устройство системы управления питанием может обеспечивать заданную последовательность запуска и выключения. Можно контролировать рабочие температуры для управления вентиляторами системы охлаждения и обнаружения неисправностей, а процедуры управления могут быть разработаны так, чтобы учитывать условия в других частях системы.
Читайте также: Шины nokian nordman rs2 suv 215 70 r16 100 r
Базовая архитектура цифровой системы управления питанием состоит из блоков питания, взаимодействующих с централизованной хост-системой управления через цифровую шину связи, как это показано на Рисунке 4.
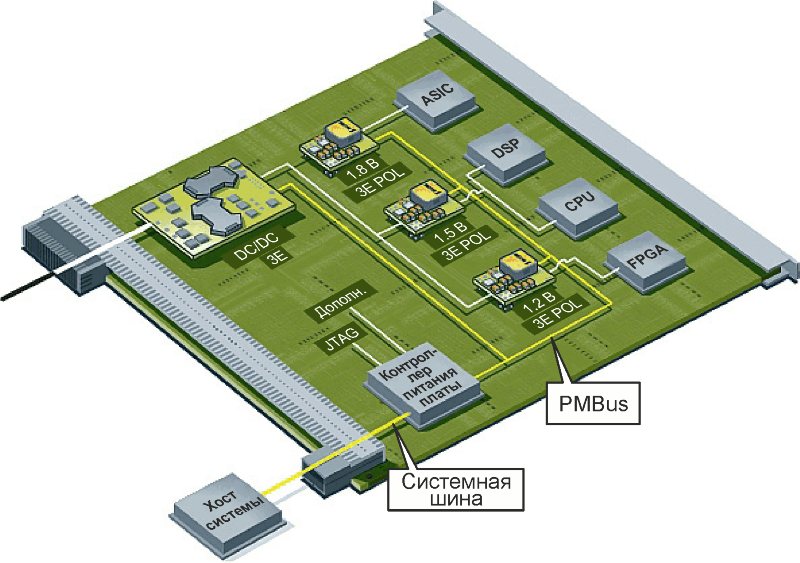 | ||
| Рисунок 4. | Цифровая система управления питанием, состоящая из источников питания (ведомых), подключенных к контроллеру (ведущему) через коммуникационную шину, изображенную желтыми линиями. | |
Источниками питания являются DC/DC преобразователи или регуляторы в точке подключения нагрузки (POL). Устройство управления может иметь различные формы, в том числе:
- Специализированная микросхема управления системой питания;
- Микроконтроллер общего назначения:
- Портативный компьютер с графическим интерфейсом пользователя;
- ATE в процессе тестирования блока питания или системы.
Объект регулирования хост-устройства состоит из одной системной платы, а в некоторых более крупных конструкциях этот хост, в свою очередь, взаимодействует с контроллерами верхнего уровня.
Система управления питанием усложняется по мере увеличения числа уровней напряжения на плате. Прежде всего, это значительно усложняет управление последовательностью подачи и снятия напряжений.
Необходимо управлять порядком подачи и снятия напряжений, временами нарастания и взаимных задержек, как при штатном запуске и выключении, так и при возникновении некоторых неисправностей. При цифровом управлении реализовать все эти функции можно достаточно просто, не прибегая к установке компонентов аналогового управления и синхронизации, или даже вообще обходясь без паяльника (Рисунок 5).
| Рисунок 5. | Цифровое управление позволяет задавать последовательность запуска и выключения нескольких источников питания. |
Еще одним примером использования цифрового управления питанием может служить контроль работоспособности источника на границах допустимых отклонений выходного напряжения. Он проводится на завершающей стадии производства для проверки устойчивости устройства. Для этого напряжения изменяются в различных комбинациях, например, на ±5% (Рисунок 6). Используя цифровую шину связи, выполнить такую проверку можно менее чем за секунду без каких-либо дополнительных аппаратных средств или подключений.
| Рисунок 6. | Цифровое управление питанием может использоваться для проверки работоспособности источника на границах допустимых отклонений выходного напряжения («серединный тест»). |
В список общих требований, попадающих в категорию конфигурирования источника питания, входит программирование порогов детекторов неисправностей. Использование цифровой шины делает эту процедуру исключительно гибкой:
- Может быть установлена тепловая защита с цифровым программированием реакции на перегрев: либо с автоматическим перезапуском, либо с блокировкой.
- Может быть установлена защита от перегрузки по току с программируемым выбором между режимами блокировки и автоматического восстановления.
- Легко программируется порог срабатывания защиты от перенапряжения для конкретной настройки выходного напряжения – как для режима блокировки, так и для режима автоматического восстановления.
Список контрольных функций включает измерение таких параметров, как входные и выходные напряжения и токи, рабочая частота и температура внутри источников питания. Большинство конечных производителей найдет эту возможность самой востребованной на этапах разработки и оценки новой системы.
Цифровой контроль позволяет проделать все эти измерения с помощью портативного компьютера и графического интерфейса пользователя, без термопар, паяльников и замены компонентов. Сбор параметрической информации на данном этапе позволяет оптимизировать систему питания и выбрать наиболее экономически эффективные источники питания.
Если разработчики систем высшего класса и высокой готовности пожелают включить функции такого рода в конечный продукт, параметрические данные можно сохранить в памяти системы управления. Примеры преимуществ, предоставляемых этим подходом:
- Возможность контроля КПД и обнаружения его деградации еще до фактического отказа, благодаря чему замена может быть осуществлена без ущерба для готовности системы.
- Можно управлять скоростью вращения вентилятора системы в соответствии с фактической температурой внутри источников питания.
- Возможность опроса всех устройств в системе для поиска местонахождения источников питания с определенными серийными номерами в целях замены подозрительной партии еще до появления сбоев.
Читайте также: Шины contyre arctic ice 185 65 r14
Большинству пользователей такая степень сложности в их конструкциях не нужна. Промежуточный подход основан на использовании прерываний.
| Рисунок 7. | Границы включения как предупреждающих, так и аварийных сигналов могут быть запрограммированы для таких параметров, как температура, выходное напряжение и ток нагрузки. |
При этом контроллер хоста не выполняет рутинного мониторинга параметрических данных, а лишь получает уведомления от источника питания в тех случаях, когда в нем возникают проблемы (Рисунок 7). Затем, в зависимости от характера неисправности, хост может принять требуемые меры.
PMBus
Шина управления питанием (Power Management Bus – PMBus) – это существующий протокол, принятый и поддержанный несколькими производителями источников питания. Протокол принадлежит Форуму интерфейса управления системой (System Management Interface Forum – SMIF).
Членство в SMIF открыто для всех заинтересованных сторон, а спецификация PMBus общедоступна и распространяется бесплатно.
PMBus является общим, универсальным и гибким интерфейсом, который может использоваться с широким спектром устройств и хорошо работает со всеми видами источников питания.
PMBus предоставляет хосту доступ к описанной выше коммуникационной архитектуре управляемых устройств, но не предусматривает возможности прямого обмена между устройствами. PMBus обеспечивает надежный, широко используемый и понятный интерфейс цифрового регулирования и управления питанием, не ограничивая внедрение других инновационных методов.
В своей исходной форме PMBus – это двухпроводная последовательная шина, основанная на шине SMBus (System Management Bus), которая, в свою очередь, является производной от популярной шины Inter-IC (I 2 C), но усовершенствованной для большей функциональности в приложениях управления питанием.
Физическая реализация стандартом PMBus не определяется. Поэтому производители блоков питания и промышленные организации, такие как Distributed-power Open Standard Alliance (DOSA) и Point of Load Alliance (POLA), сотрудничают друг с другом, чтобы договориться о стандартных конфигурациях конструктивных параметров, внешних контактов и механических интерфейсов для межсоединений устройств и их программирования.
Заключение
Цифровые технологии питания предлагались на протяжении ряда лет, но успешно конкурировать с аналоговыми решениями до последнего времени они не могли. Благодаря увеличению плотности ИС, упорной работе изготовителей полупроводниковых компонентов, развитию и повышению надежности технологии КМОП, сегодня цифровой обработка данных для приложений преобразования энергии стала весьма привлекательной. Самое главное, что использование цифровых технологий предоставляет возможность расширения функциональности и улучшения технических характеристик как отдельных источников питания, так и системы в целом, что аналоговыми методами реализовать невозможно.
Хотя основной фокус публичных обсуждений сосредоточен на проблемах, связанных с системами управления питанием, наиболее важным вопросом и, в конечном итоге, движущей силой внедрения цифровых методов, будут преимущества, которые они принесут самому источнику питания. И современные технологии делают эти преимущества реальными, измеримыми и доступными:
- Надежность, улучшенная за счет более высокой интеграции схем цифрового управления;
- Стоимость системы, сниженная благодаря сокращению количества развязывающих конденсаторов вследствие улучшения переходных характеристик при адаптивном цифровом управлении;
- Плотность мощности источника питания, увеличенная за счет меньших размеров цифровых схем управления;
- Более жесткие допуски на отклонения выходного напряжения благодаря повышению точности первоначальной настройки;
- Сокращение общих эксплуатационных затрат за счет перечисленных выше улучшений.
Паритет затрат между цифровой и аналоговой реализацией управления при использовании современных технологий делает эти преимущества «бесплатными» для конечного пользователя и приносит реальную пользу потребителям.
Использование цифрового интерфейса в источниках питания дает существенные преимущества на этапах разработки и оценки системы. Коммуникационная шина дает возможность полной подстройки под требования пользователя, а конечным результатом является сокращение времени разработки, упрощение управления питанием и, как следствие, ускорение выхода на рынок конечного продукта.
Механизм пользовательских настроек позволяет один и тот же тип источника использовать для нескольких целей, тем самым, уменьшая объемы складских запасов, сокращая номенклатуру покупных изделий и снижая затраты времени на поиск поставщиков источников питания.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле