
Универсальный асинхронный приёмопередатчик (Univsersal Asynchronos Reciever-Transmitter) — это физическое устройство приёма и передачи данных по двум проводам. Оно позволяет двум устройствам обмениваться данными на различных скоростях. В спецификацию UART не входят аналоговые уровни на которых ведётся общение между устройствами, UART это протокол передачи единиц и нулей, электрическую спецификацию на себя берут другие стандарты, такие как TTL (transistor-transistor logic — транзисторно-транзисторная логика), RS-232, RS-422, RS-485 и другие (RS [англ.recommended standard] — рекомендованный стандарт). На данный момент в микроконтроллерах используется в основном TTL (или точнее CMOS) UART для соединения не более двух устройств. В наших примерах мы часто называем его последовательным портом.
- Подключение:
- Пример соединения двух UNO:
- UART на Arduino:
- Arduino UNO/Piranha UNO
- Piranha ULTRA
- Arduino MEGA
- Отладка проектов при помощи UART
- Программный UART на Arduino
- UART на Raspberry Pi:
- Подробнее о UART:
- Параметры
- Кадрирование данных
- Скорость передачи данных
- Методы связи
- UART ПРОТОКОЛ: ОПИСАНИЕ РАБОТЫ
- Что такое UART
- Почему используют UART
- Блок-схема UART
- Как работает UART
- Параллельное преобразование в последовательное
- Последовательное преобразование в параллельное
- Формат протокола UART
- Передача данных
- Прием данных
- Пример интерфейса UART
- Команды ESP8266
- UART и USART
- RS232 и UART
- Логика TTL / CMOS
- Преимущества и недостатки UART
- Области применения протокола
Подключение:
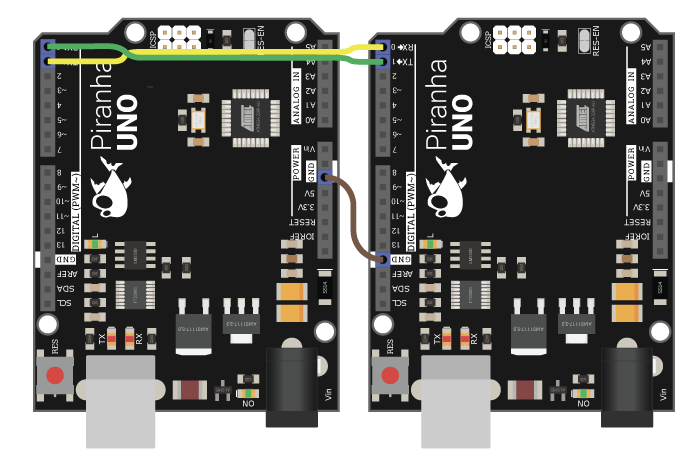
У каждого устройства, поддерживающего UART обычно обозначены два вывода: RX и TX. TX — означает transmit (передаю), RX — receive (принимаю). Отсюда становится понятно что RX одного устройства нужно подключать к TX другого. Если Вы подключите RX одного устройства к RX другого, то оба устройства будут слушать друг друга, вы соединили их входы. Если соединить TX и TX — это уже более опасно, это выходы низкого сопротивления устройств и если на одном будет логическая единица, а на втором ноль — по проводу пойдёт ток короткого замыкания (это зависит от конкретной программной или аппаратной реализации). Хотя в современных чипах от этого есть защита, на всякий случай, не стоит на неё ориентироваться. Так же необходимо объединить референсные уровни двух устройств (GND—GND), если не подразумевается гальваническая развязка.
Пример соединения двух UNO:
UART на Arduino:
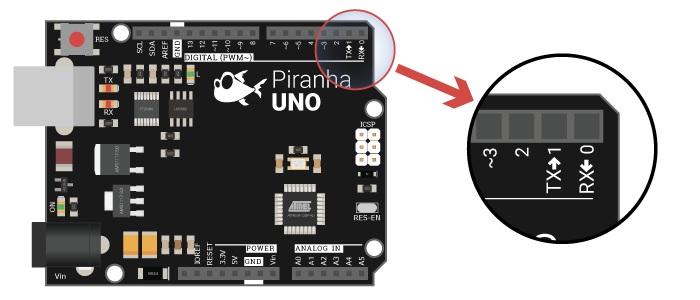
На Arduino и Arduino-совместимых платах аппаратный UART обозначается символами RX и TX рядом с соответствующими выводами. На Arduino UNO/Piranha UNO это 0 и 1 цифровые выводы:
Arduino UNO/Piranha UNO
В скетче инициализируется функцией begin() в коде функции setup():
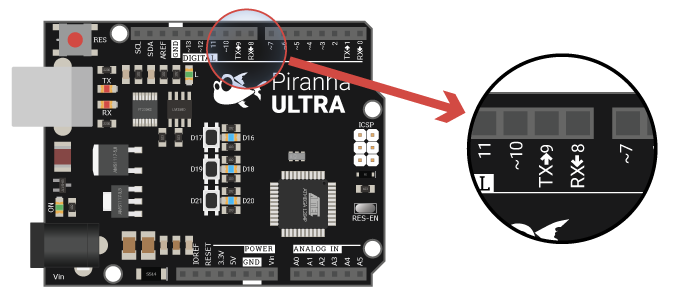
Piranha ULTRA
На Piranha ULTRA присутствуют два аппаратных UART. Один на тех же выводах, что и UNO, второй на 8 (RX) и 9 (TX) выводах:
В Arduino IDE второй аппаратный UART называется Serial1 (Сериал один), и инициализируется так же как и первый:
Простой пример для копирования буфера первого UART’а во второй и наоборот:
Arduino MEGA
У Arduino MEGA, помимо UART’a на цифровых выводах 0 и 1 как и у UNO, присутствуют ещё три аппаратных UART. На плате это выводы 19 (RX1), 18 (TX1), 17 (RX2), 16 (TX2) и 15 (RX3), 14 (TX3) соответственно. UART совместимый по расположению с UNO обозначен RX0, TX0:
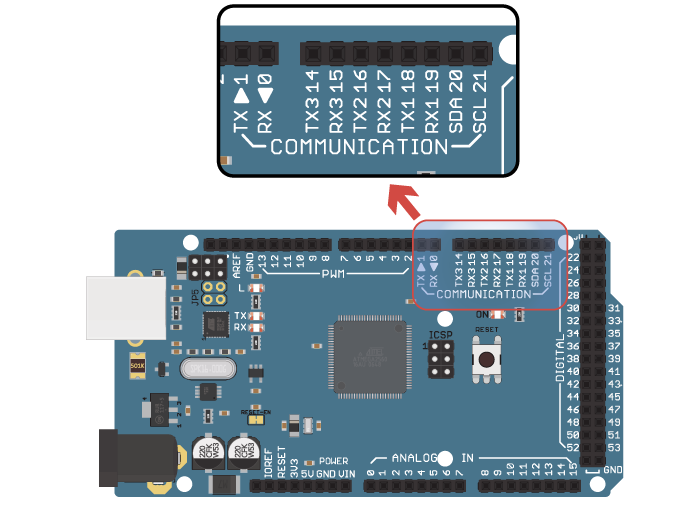
На заметку: На многих Arduino и Arduino-совместимых платах UART0 используется для загрузки скетчей, так что если Ваш скетч не загружается, проверьте эти выводы. Во время загрузки скетча к ним ничего не должно быть подключено.
Отладка проектов при помощи UART
В совокупности с монитором последовательного порта UART может быть очень полезен для отладки кода. Например, если не понятно доходит ли Ваш код до определённого места или какие значения принимает переменная, можно вызвать функцию println() и вывести значение переменной или какое-нибудь сообщение в монитор порта. В Arduino IDE монитор порта находится в меню Инструменты -> Монитор порта, так же его можно вызвать нажав пиктограмму лупы в правом верхнем углу главного окна Arduino IDE или вызвать с клавиатуры комбинацией клавиш Ctrl+Shift+M. Перед вызовом монитора порта необходимо выбрать порт с которым Вы хотите работать. Сделать это можно в меню Инструменты -> Порт.
Для удобства отладки можно указать директивы препроцессора языка Си #define , #ifdef , #ifndef
Программный UART на Arduino
Помимо аппаратного UART в Arduino можно использовать программный. Программный порт хорошо подходит для простых проектов, не критичных к времени работы кода или для отладки проектов, позволяя не отключать модули использующие UART во время загрузки сетчей. При его использовании нужно лишь помнить что никакой другой код не может выполняться пока программа занимается считыванием данных из него и передача может осуществляться только в полудуплексном или симплексном режимах. Так же на программный RX можно назначать только те выводы, которые поддерживают прерывание по смене уровней. На UNO, например, это все цифровые выводы, кроме 13-го. Прежде чем собирать свой проект, проконсультируйтесь с инструкцией к конкретной плате.
Пример использования программного порта:
Далее к программному порту нужно обращаться через объект mySerial . Например: mySerial.write(data); .
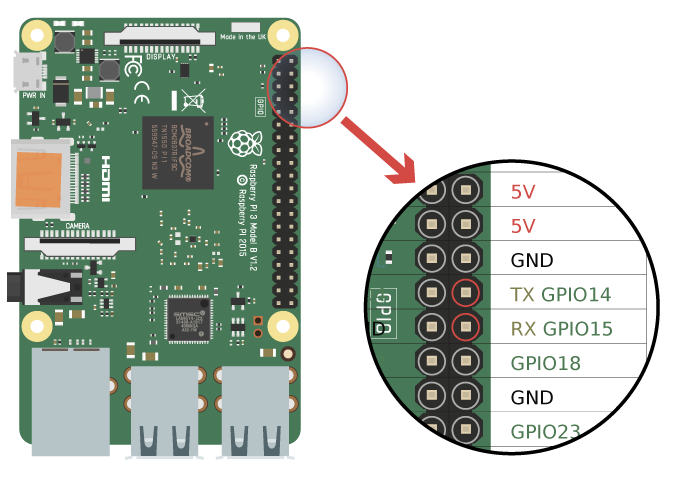
UART на Raspberry Pi:
На Raspberry Pi UART находится на выводах колодки 8 — TX (GPIO14) и 10 — RX (GPIO15)
Перед работой с последовательным портом необходимо его включить. Сделать это можно из эмулятора терминала командой sudo raspi-config -> Interfacing options -> Serial -> No -> Yes -> OK -> Finish или из графической среды в главном меню -> Параметры -> Raspberry Pi Configuration -> Interfaces -> Serial Port
Читайте также: Водоотводная шина для деревянных окон
Пример работы с последовательным портом на Python:
Данный пример выводит строку «iArduino.ru» в последовательный порт Raspberry и ждёт данных из последовательного порта.
Подробнее о UART:
Параметры
При обозначении параметров UART принято использовать короткую запись ЦИФРА—БУКВА—ЦИФРА
- ЦИФРА — количество бит в кадре
- от 5 до 9 бит. Обычно 8.
- N — None (Отсутствует) без бита чётности
- E — Even (Чётный). Проверка данных на чётность. Перед стоп-битом в кадр добавляется бит: 0 если в кадре было нечётное количество единиц, 1 — если чётное.
- O — Odd (Нечётный). Проверка данных на нечётность. Перед стоп-битом в кадр добавляется бит: 1 если в кадре было нечётное количество единиц, 0 — если чётное.
- 1, 1.5, 2. Продолжительность стоп-бита (1, 1.5 или 2 битовых интервала)
Таким образом, стандартные настройки в Arduino: 8-N-1
Кадрирование данных
При приёме-передаче данных каждое устройство ориентируется на своё внутреннее тактирование. Обычно это тактирование от 8 до 16 раз быстрее скорости передачи данных и обычно отсчитывается от стартового бита. Именно поэтому необходимо чтобы оба устройства были настроены на одну и ту же скорость передачи.
Так же при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит. Старт-бит сигнализирует о начале передачи данных и стоп-бит, соответственно об окончании.
Рассмотрим кадр данных:
При разговорах о серийный протоколах принято использовать такие слова как кадр и пакет. Кадр — интервал от старт-бита до стоп-бита. Пакет — количество кадров полезных данных. При этом не стоит путать кадр и байт: байт — это только сами данные, не включающие в себя синхронизирующие и проверочные биты.
При отсутствии передачи линия удерживается в состоянии логической единицы (в случае TTL Arduino это 5 вольт или Vcc). Как только передающее устройство притягивает линию к 0 (GND или 0 вольт в случае Arduino), это сигнализирует принимающему устройству о том что сейчас будет передача данных.
При появлении старт-бита на линии принимающее устройство начинает отсчитывать время в соответствии с установленной скоростью и считывать состояния линии через определённые промежутки времени в соответствии с установленным количеством бит данных, после этого.
По завершении передачи данных принимающее устройство ожидает стоп-бит, который должен быть на уровне логической единицы. Если по завершении кадра удерживается логический ноль, значит данные неверны. Если логический ноль удерживается время, превышающее длину кадра в 1,5 раза, такое состояние именуется break (разрыв линии, исторически пошло от устройств, использующих токовую петлю для передачи данных). Некоторые передатчики вызывают это состояния специально перед посылкой пакета данных. Некоторые приёмники считают такое состояние за неправильно выставленную скорость и сбрасывают свои настройки на установки «по умолчанию».
Скорость передачи данных
Скорость изменения логических уровней (импульсов) на линии принято измерять в бодах. Единица измерения названа так в честь французского изобретателя Жана Мориса Эмиля Бодо.
Скорость при использовании UART может быть любой, единственное требование — скорости передающего и принимающего должны быть одинаковы. Стандартная скорость UART принята за 9600 бод. Arduino без проблем и лишних настроек может принимать и передавать данные на скоростях до 115200 бод.
Так как при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит, не совсем корректно говорить, что скорость 9600 бод равна 9600 битам в секунду. Если речь идёт о полезных данных, то реальная скорость на 20% ниже. Например, если выставлены параметры 8-N-1 и 9600 бод, то на передачу одного байта уходит десять бит, и 9600/10 = 960 байт, что равно 7680 битам в секунду.
Методы связи
UART позволяет одновременно передавать и принимать данные, однако не всегда это возможно или нужно. Например, если Вам нужно только получать не критические данные (которые можно проверить следующим пакетом, например расстояние, посылаемое лидаром каждые несколько сотен миллисекунд) от цифрового датчика или любого другого устройства и не нужно ничего передавать, такой метод называется симплексным. Всего различают три метода связи:
- Полнодуплексная — когда ведущий и ведомый могут одновременно принимать и передавать (одновременная передача в обе стороны)
- Полудуплексная — когда ведущий и ведомый поочерёдно принимают и передают (Поочерёдная передача в обе стороны)
- Симплексная — когда ведущий или ведомый только передают (Передача в одну сторону)
UART ПРОТОКОЛ: ОПИСАНИЕ РАБОТЫ
UART (Universal Asynchronous Transmitter Receiver) это наиболее распространенный протокол, используемый для полнодуплексной последовательной связи. Устройство отправляет и получает данные из одной системы в другую. В этом мануале мы подробно изучим основы связи и работу протокола UART, подробное описание интерфейса и распиновку разъёмов..
Читайте также: Шина медная м1т 3х15х300мм

Что такое UART
UART означает универсальный асинхронный приемник-передатчик. Это периферийное оборудование, которое находится внутри микроконтроллера. Функция UART заключается в преобразовании входящих и исходящих данных в последовательный двоичный поток. Восьмибитные последовательные данные, полученные от периферийного устройства, преобразуются в параллельную форму с использованием последовательного преобразования в параллельное, а параллельные данные, полученные от ЦП, преобразуются с помощью преобразования из последовательного в параллельный. Эти данные представлены в модулирующей форме и передаются с определенной скоростью передачи.
Почему используют UART
Для быстрой связи используются такие протоколы, как SPI (последовательный периферийный интерфейс) и USB (универсальная последовательная шина). Но когда высокоскоростная передача данных не требуется, применяют протокол UART. Это дешевое устройство связи с одним передатчиком и приемником. Тут требуется лишь один провод для передачи данных и один для приема. О конвертере USB-ART прочитайте по ссылке.
Его можно подключить к персональному компьютеру с помощью преобразователя RS232-TTL или USB-TTL. Сходство между RS232 и UART заключается в том, что им обоим не нужен таймер для передачи и приема данных. Кадр UART состоит из 1 стартового бита, 1 или 2 стоповых битов и бита четности для последовательной передачи данных.
Блок-схема UART
UART состоит из следующих основных компонентов: передатчик и приемник. Передатчик состоит из регистра удержания передачи, регистра сдвига передачи и логики управления. Точно так же приемник состоит из регистра удержания приема, регистра сдвига приемника и логики управления. Обычно и передатчик, и приемник снабжены генератором скорости передачи данных.
Генератор скорости передачи данных формирует скорость, с которой передатчик и приемник должны отправлять и получать данные. Регистр удержания передачи содержит передаваемый байт данных. Регистр сдвига передачи и регистр сдвига приемника сдвигают биты влево или вправо, пока байт данных не будет отправлен или получен.
В дополнение к этому, предусмотрена логика управления чтением или записью, указывающая когда читать и записывать. Генератор скорости передачи данных формирует скорости в диапазоне от 110 бит / с до 230400. В большинстве случаев микроконтроллеры предлагают более высокие скорости передачи, такие как 115200 и 57600 бит / с, но такие устройства как GPS и GSM, используют более низкую скорость в 4800 и 9600 бод.
Как работает UART
Передатчик и приемник используют стартовый бит, стоповый бит и параметры синхронизации для взаимодействия друг с другом. Исходные данные находятся в параллельной форме. Например есть 4-х битные данные, и чтобы преобразовать их в последовательную форму нужен преобразователь из параллельного в последовательный. Обычно для проектирования преобразователей используются D-триггеры.
D-триггер, также известный как триггер данных, сдвигает один бит со стороны входа на сторону выхода только тогда, когда таймер изменяет переход из высокого состояния в низкое или из низкого состояния в высокое. Точно так же, если надо передать 4 бита данных, понадобится 4 триггера.
Теперь спроектируем преобразователь из параллельного в последовательный и из последовательного в параллельный.
Параллельное преобразование в последовательное
Шаг 1: Возьмем 4 триггера. Количество триггеров эквивалентно количеству передаваемых битов. Точно так же поставим мультиплексоры перед каждым триггером, но исключая первый. Установлен мультиплексор для объединения данных и преобразования их в последовательные биты. Он имеет два входа: один параллельный бит данных, а другой — от предыдущего триггера.
Шаг 2: Теперь загружаем данные за раз в D-триггеры. Он будет извлекать параллельные данные и перемещать последний бит последнего триггера — четвёртый, затем третий бит, второй и, наконец, первый бит. Теперь для преобразования параллельных данных в последовательную форму используется другой преобразователь.
Последовательное преобразование в параллельное
Шаг 1: Возьмем 4 триггера. Количество триггеров совпадает с количеством передаваемых битов.
Шаг 2: Сначала отключим параллельную шину. Не включаем пока не будут загружены все биты. Сохраним данные на входе первого триггера. Теперь установим высокий уровень тактовой частоты, это сдвинет младший бит на вход второго триггера и выход первого. Точно так же сдвинем все биты один за другим, сделав тактовый импульс высоким. Преобразователь находится в состоянии удержания до тех пор, пока все биты не будут переданы на выход.
Шаг 3: Теперь каждый триггер содержит один бит последовательных данных. Пока все биты передаются на выход триггера, активируем шину. Это заставит конвертер отправлять все биты за раз.
Формат протокола UART
Начинается связь со стартовым битом «0». Стартовый бит инициирует передачу последовательных данных, а стоповый бит завершает транзакцию данных.
Он также имеет бит четности (четный или нечетный). Бит четности представлен как «0» (четное количество единиц), а бит нечетной четности представлен как «1» (нечетное количество).
Читайте также: Шина массы nls 10 ik020014
Передача данных
Передача данных осуществляется по одной линии передачи (TxD). Здесь «0» рассматривается как пробел, а «1» — как состояние отметки.
Передатчик отправляет по одному биту за раз. После отправки одного бита отправляется следующий. Таким образом, все биты данных отправляются на приемник с заранее определенной скоростью передачи. При передаче каждого бита будет определенная задержка. Например, чтобы отправить один байт данных со скоростью 9600 бод, каждый бит отправляется с задержкой 108 мкс. Данные добавляются с битом четности. Таким образом для отправки 7 бит требуется 10 бит данных.
При передаче всегда сначала передается LSB (Least Significant Bit — младший значащий бит).
Прием данных
Для приема данных используется приёмная линия RxD.
Пример интерфейса UART
Этот пример демонстрирует взаимодействие ESP8266 UART с MAX232. Микросхема MAX232 питается от источника 5 В, и включает в себя генератор емкостного напряжения для управления напряжением 232 уровня. Она поставляется с двумя передатчиками, также называемыми драйвером (Tin, Tout) и приемниками (Rin и Rout).
Здесь использовался ESP8266 (32-битный микроконтроллер) со встроенным UART. Связь может осуществляться с ESP8266 с использованием AT-команд через преобразователь уровня RS232 в TTL (MAX232). На схеме показано подключение ESP8266 к компьютеру.
Запрашивая действительные AT-команды через ПК, микросхема Wi-Fi ответит подтверждением. Вот шаги для реализации последовательной связи с ПК.
- Подключить передатчик (TX) ESP8266 к приемнику (RX) преобразователя уровня RS232 в TTL (MAX232) и приемника ПК.
- Подключить приемник (RX) ESP8266 к TX ПК и RX преобразователя TTL.
Команды ESP8266
Далее показан ответ модуля ESP8266.
UART и USART
USART — это основная форма UART. Технически это не одно и то же, но определение для них одинаково. Это периферийные устройства микроконтроллера, которые преобразуют параллельные данные в последовательные биты и наоборот.
UART USART Тайминги генерируются внутри микроконтроллера. Отправляющее устройство сгенерирует тайминг. Скорость передачи данных низкая. Скорость передачи данных выше из-за внешних таймингов. Автономный протокол Поддерживает несколько протоколов, таких как LIN, RS-485, IrDA, смарт-карта и т. д. Перед передачей необходимо знать скорость передачи. Нет необходимости знать скорость передачи заранее. Подходит для низкоскоростной связи Подходит для высокоскоростной связи. Сниженный энергетический след. Обеспечивает последовательную связь при высоком энергопотреблении Основное различие между UART и USART заключается в том, что UART поддерживает только асинхронную связь, тогда как USART поддерживает как синхронную, так и асинхронную. Вот сравнение между USART и UART:
RS232 и UART
Логические уровни представляют собой уровни рабочего напряжения, которые устройство может выдержать для работы в безопасной зоне. Вот уровни напряжения для RS232 и TTL:
В большинстве случаев уровни RS232 находятся в диапазоне от -12 В до +12 В. Например, значение ASCII для символа «A» в RS232 составляет 65 и 41 в шестнадцатеричном формате. Таким образом, в 8-битном двоичном формате это 0100 0001. Здесь показано представление логических уровней RS232 для ASCII «A».
Логика TTL / CMOS
UART работает по TTL логике.
Первоначально последовательная линия находится в состоянии ожидания, обычно называемом статусом отметки (логическая 1). Теперь передача данных начинается со стартового бита (логический 0). Кроме того, по последовательной линии один за другим отправляются 8 бит данных, причем сначала младший бит LSB (Least significant bit — младший значащий бит). После завершения всей передачи идёт стоповый бит (логическая 1).
Преимущества и недостатки UART
- Преимущество UART в том, что протокол поддерживает полнодуплексную связь по двум проводам. Кроме того, для передачи данных не требуются внешний таймер. Он поддерживает проверку ошибок с помощью бита четности, а длину данных можно легко изменить.
- Основным недостатком является то, что он не поддерживает конфигурацию с несколькими ведомыми или несколькими ведущими устройствами. И размер пакета данных ограничен 9 битами. UART не подходит для сложной последовательной связи при высоком энергопотреблении.
Области применения протокола
Последовательный порт отладки использует драйвер UART для печати данных, поступающих извне. Можем использовать этот протокол для отправки и получения команд на встроенные устройства и от них. Также выполняется связь в GPS, модеме GSM / GPRS, чипах Wi-Fi и других модулях работающих с UART. Используется в доступе к мэйнфрейму для подключения разных компьютеров.
Форум по обсуждению материала UART ПРОТОКОЛ: ОПИСАНИЕ РАБОТЫ
Схема простого устройства для демонстрации эффекта электромагнитного ускорения металлического снаряда в пушке Гаусса.
Принципиальная схема гальванической развязки для 8-канального логического анализатора. Скорость передачи данных до 10 Мбит.
Предусилитель со стерео темброблоком для усилителя мощности, собранный на ОУ 4558.
Самодельная полка-кассетница для хранения мелких деталей и других электрических компонентов.
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле






















