
Нагружение стержня, при котором из всех внутренних силовых факторов в его поперечных сечениях не равен нулю только момент, вектор которого направлен вдоль оси стержня, называется кручением. Стержни, работающие в таких условиях, называются валами.
При кручении цилиндрического вала, в его поперечных сечениях возникают только касательные напряжения, и это напряженное состояние называется «чистый сдвиг». При этом, поперечные сечения вала остаются плоскими и не меняют своего размера в радиальном направлении. Так же не меняются расстояния между поперечными сечениями, но при этом они поворачиваются друг относительно друга на некоторый угол φ.
В общем случае, максимальные касательные напряжения возникают у края поперечного сечения, за исключением наружных углов, в которых касательные напряжения равны нулю. Стержень не круглого поперечного сечения испытывает депланации — точки его сечения выходят из плоскости и перемещаются вдоль оси стержня в различных направлениях.
Онлайн расчеты, представленные в данном разделе, рассматривают кручение круглого вала сплошного сечения, кручение круглого вала с отверстием, выполненным с эксцентриситетом, треугольное, прямоугольное сечение, а так же кручение стержней стандартных сечений — уголка, двутавра и швеллера.
- Расчет кручения вала круглого сечения
- Исходные данные:
- Максимальное касательное напряжение:
- Угол поворота:
- Расчет кручения вала круглого сечения с отверстием
- Исходные данные:
- Расчет кручения стержня прямоугольного сечения
- Исходные данные:
- Расчет кручения стержня треугольного сечения
- Исходные данные:
- Расчет кручения стержня прямоугольного сечения с тонкой стенкой
- Исходные данные:
- Расчет кручения уголка
- Исходные данные:
- Расчет кручения швеллера
- Исходные данные:
- Расчет кручения двутавра
- Исходные данные:
- Энкодеры — датчики угла поворота
- Преобразователь угла поворота вала в напряжение Советский патент 1986 года по МПК H03M1/00
- Описание патента на изобретение SU1221748A1
- Похожие патенты SU1221748A1
- Иллюстрации к изобретению SU 1 221 748 A1
- Реферат патента 1986 года Преобразователь угла поворота вала в напряжение
Расчет кручения вала круглого сечения
Расчет максимальных касательных напряжений и угла поворота при кручении вала сплошного круглого сечения.
Исходные данные:
D — наружный диаметр вала, в миллиметрах;
L — длина вала, в миллиметрах;
Т — крутящий момент на валу, в ньютонах × метр;
Е — модуль упругости материала вала, в паскалях.
КРУЧЕНИЕ ВАЛА КРУГЛОГО СЕЧЕНИЯ
Крутящий момент на валу Т, Н*м
Максимальное касательное напряжение τ, МПа
Максимальное касательное напряжение:
Угол поворота:
φ = 2T×L / (π×r 4 × G),где
G — модуль сдвига.
Расчет кручения вала круглого сечения с отверстием
Расчет максимальных касательных напряжений и угла поворота при кручении вала круглого сечения c отверстием.
Исходные данные:
D — наружный диаметр вала, в миллиметрах;
d — внутренний диаметр вала, в миллиметрах;
e — эксцентриситет отверстия, в миллиметрах;
L — длина вала, в миллиметрах;
Т — крутящий момент на валу, в ньютонах × метр;
Е — модуль упругости материала вала, в паскалях.
КРУЧЕНИЕ ВАЛА С ОТВЕРСТИЕМ
Крутящий момент на валу Т, Н*м
Максимальное касательное напряжение τ, МПа
Расчет кручения стержня прямоугольного сечения
Расчет максимальных касательных напряжений и угла поворота при кручении стержня прямоугольного сечения.
Исходные данные:
a — длина сечения стержня, в миллиметрах;
b — высота сечения стержня, в миллиметрах;
L — длина стержня, в миллиметрах;
Т — крутящий момент, в ньютонах × метр;
Е — модуль упругости материала стержня, в паскалях.
КРУЧЕНИЕ ПРЯМОУГОЛЬНОГО СТЕРЖНЯ
Максимальное касательное напряжение τ, МПа
Расчет кручения стержня треугольного сечения
Расчет максимальных касательных напряжений и угла поворота при кручении стержня треугольного равнобедренного сечения.
Исходные данные:
a — длина основания сечения стержня, в миллиметрах;
b — длина боковой стороны сечения стержня, в миллиметрах;
L — длина стержня, в миллиметрах;
Т — крутящий момент, в ньютонах × метр;
Е — модуль упругости материала стержня, в паскалях.
КРУЧЕНИЕ СТЕРЖНЯ ТРЕУГОЛЬНОГО СЕЧЕНИЯ
Длина боковой стороны b, мм
Максимальное касательное напряжение τ, МПа
Расчет кручения стержня прямоугольного сечения с тонкой стенкой
Расчет максимальных касательных напряжений (τ на стороне b иτ1 на стороне a) и угла поворота при кручении стержня прямоугольного сечения с тонкой стенкой.
Исходные данные:
a — длина сечения сечения стержня, в миллиметрах;
b — высота сечения стержня, в миллиметрах;
s — толщина стенки стержня на стороне b, в миллиметрах;
s1 — толщина стенки стержня на стороне a, в миллиметрах;
L — длина стержня, в миллиметрах;
Т — крутящий момент, в ньютонах × метр;
Е — модуль упругости материала стержня, в паскалях.
КРУЧЕНИЕ ТОНКОСТЕННОГО ПРЯМОУГОЛЬНОГО СТЕРЖНЯ
Максимальное касательное напряжение τ, МПа
Максимальное касательное напряжение τ1, МПа
Расчет кручения уголка
Расчет максимальных касательных напряжений и угла поворота при кручении уголка.
Стержни таких поперечных сечений как уголок, швеллер, двутавр никогда не предназначаются для передачи крутящего момента, но в некоторых случаях могут испытывать крутящие нагрузки вследствие особенностей общей геометрии конструкции.
Исходные данные:
a — высота уголка, в миллиметрах;
b — ширина уголка, в миллиметрах;
b, d — толщина полок уголка, в миллиметрах;
r — радиус закругления полок, в миллиметрах;
L — длина стержня, в миллиметрах;
Т — крутящий момент, в ньютонах × метр;
Е — модуль упругости материала стержня, в паскалях.
Максимальное касательное напряжение τ, МПа
Расчет кручения швеллера
Расчет максимальных касательных напряжений и угла поворота при кручении швеллера.
Исходные данные:
a — ширина швеллера, в миллиметрах;
с — высота швеллера, в миллиметрах;
b — толщина полки, в миллиметрах;
d — толщина стенки, в миллиметрах;
r — внутренний радиус закругления, в миллиметрах;
L — длина стержня, в миллиметрах;
Т — крутящий момент, в ньютонах × метр;
Е — модуль упругости материала стержня, в паскалях.
Максимальное касательное напряжение τ, МПа
Читайте также: Подшипник рулевого вала 2101
Расчет кручения двутавра
Расчет максимальных касательных напряжений и угла поворота при кручении двутавра.
Исходные данные:
a — ширина двутавра, в миллиметрах;
с — высота двутавра, в миллиметрах;
b — толщина полки, в миллиметрах;
d — толщина стенки, в миллиметрах;
r — внутренний радиус закругления, в миллиметрах;
L — длина стержня, в миллиметрах;
Т — крутящий момент, в ньютонах × метр;
Е — модуль упругости материала стержня, в паскалях.
Энкодеры — датчики угла поворота

Позиционирование в различных видах промышленного оборудования обеспечивается с использованием простых с виду устройств — энкодеров (или, по-другому, датчиков угла поворота).
Энкодеры используются для преобразования линейного или вращательного движения в двоичный цифровой сигнал. Энкодер представляет собой устройство, вал которого соединяется с вращающимся валом исследуемого объекта, и обеспечивает электронный контроль угла поворота последнего. По принципу действия энкодеры подразделяются на оптические и магнитные.
На валу оптического энкодера установлен диск с окнами прерывания по периметру, напротив которых размещены светодиод и фототранзистор, обеспечивающие формирование выходного сигнала в виде последовательности прямоугольных импульсов с частотой, пропорциональной как количеству окон прерывания, так и скорости вращения диска/вала. Количество импульсов отображает угол поворота.
Оптические энкодеры выпускаются в виде инкрементальных и абсолютных датчиков.
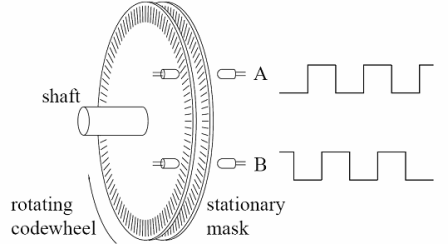
Инкрементальные энкодеры имеют диск прерывания с множеством окон одинакового размера на основном радиусе и две считывающих оптопары, что позволяет фиксировать как угол поворота, так и направление вращения вала. На вспомогательном радиусе диска размещено единственное окно прерывания и соответствующая оптопара, определяющие исходное положение (начало отсчета).
Отрицательный момент — инкрементальные энкодеры выдают относительный отсчет угла поворота, информация о котором не сохраняется при остановке вращения. К их преимуществам следует отнести простоту конструкции (и, соответственно, невысокую стоимость) при высоком разрешении и высокой рабочей частоте.
Инкрементальные энкодеры повышенной стойкости ориентированы на индустриальное применение — в машиностроении, прокатных станах, судостроении, текстильной, обувной промышленности, в деревообработке. Для таких энкодеров определяющими являются параметры — разрешение по углу поворота, способность работать на высоких частотах, высокая степень защиты, чтобы противостоять условиям неблагоприятной среды.
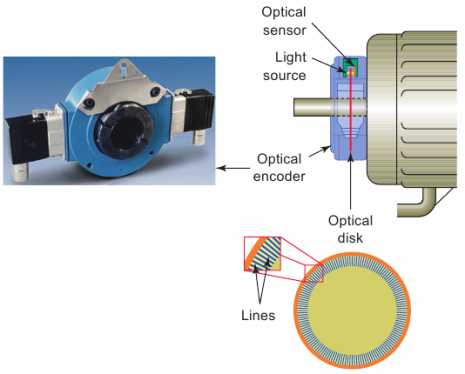
Диск с линиями или прорезями, которые прерывают луч света на оптический датчик. Электронная схема подсчитывает прерывания луча и генерирует цифровые выходные импульсы энкодера.
Кодирующий диск — устройство для преобразования в цифровую форму величин угловых перемещений вала. На кодирующий диск наносится геометрическое изображение цифрового кода. Знаки разрядов кода наносятся на концентрической дорожки, причем ближе к периферии располагаются младшие (менее значащие) разряды.
В зависимости от способа съема кода (контактного, фотоэлектрического, электромагнитного, индукционного, электростатического и т. п.) геометрическое изображение кода составляется из участков электропроводящих и электроизолированных, прозрачных и непрозрачных, магнитных и немагнитных и т. п.
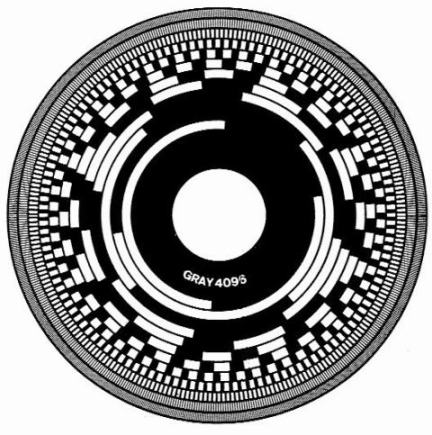
Преимущественно распространение получили кодирующие диски с разновидностями двоичного кода, исключающими возникновение ошибок при переходе через границы отдельных дискретных участков, когда некоторые разряды могут считываться по одну сторону границы, а некоторые — по другую (из-за неточной установки съемных устройств или из-за неодновременном считывания кода в процессе вращения диска. К числу таких кодов относятся т. н. фау-код (код Баркера) и рефлексный код (код Грея).
В некоторых оптических поворотных энкодерах используется отражательный кодирующий диск. На этом диске чередуются секции, которые поглощают свет или отражают его, а источник света вместе с приемником располагаются с одной стороны диска. При наличии только одного источника и приемника света последовательность импульсов от датчика позволяет выяснить, на сколько шагов повернулся диск относительно своего предыдущего положения.
Одиночный датчик не может указывать направление вращения, но если добавить вторую пару «источник приемник», отстоящую по фазе на 90 о от первой, то микроконтроллер по разности фаз между последовательностями импульсов сможет определить направление вращения диска.
Следует помнить, что любая система, которая определяет относительное вращение диска, но не может измерить его абсолютное угловое положение, является инкрементным датчиком.
Абсолютный энкодер имеет диск прерывания с концентрическими окнами на разных радиусах, относительные размеры которых определяются двоичным кодом, и которые считываются одновременно, давая кодированный выходной сигнал для каждой угловой позиции (код Грея, бинарный код. ).
В данном случае имеется возможность получать данные о мгновенном положении вала без цифрового счетчика или возврата к исходному положению, так как на выходе имеется кодированное слово — «n bit», защищенное от электрических шумов.
Абсолютные энкодеры используются в приложениях, требующих обязательного сохранения поступающих данных в течение продолжительного времени, при этом они сложнее по конструкции и являются более дорогостоящими.
Абсолютные энкодеры с интерфейсом полевой шины имеют выходной интерфейс связи с полевой шиной по стандарту CANopen, ProfiBus, DeviceNet, Ethernet, InterBus и используют бинарный код при определении угла поворота. Вышеуказанные интерфейсы связи программируются по ряду параметров: например, направление вращения, разрешение по импульсам на один оборот, скорость передачи данных.

Энкодеры, установленные на валу электродвигателя , эффективно обеспечивают управление точным позиционированием. Такие энкодеры обычно изготавливаются в варианте «отверстие» и важными элементами их конструкции являются специальные муфты, позволяющие компенсировать люфты вала двигателя.
Читайте также: Что нужно для аквариума компрессор или фильтр
Позиционирование в вышеуказанных условиях наиболее эффективно обеспечивает магнитный энкодер , в котором преобразование углового перемещения вала в электронный сигнал реализуется бесконтактно на основе эффекта Холла, не связано с вращением оптического прерывателя внутри датчика, и допускает обработку сигналов на скоростях до 60000 об/мин.
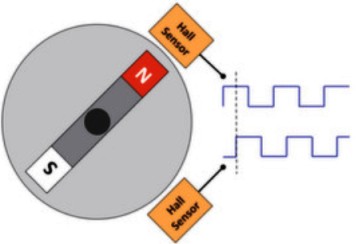
В магнитном энкодере высокоскоростное вращение внешнего вала, на котором закреплен цилиндрический постоянный магнит, воспринимается датчиком Холла, совмещенным на одном полупроводниковом кристалле с контроллером обработки сигналов.
При вращении полюсов постоянного магнита над микросхемой с датчиком Холла переменный вектор магнитной индукции наводит напряжение Холла, содержащее информацию о мгновенном значении угла поворота вала. Микроконтроллер обеспечивает быстрое преобразование напряжения Холла в параметр угла позиционирования.

Возможность такого преобразования без непосредственного механического соединения элементов магнита и датчика Холла является основным преимуществом магнитных энкодеров, обеспечивает им высокую надежность и долговечность, и позволяет эффективно работать в высокоскоростных приложениях, связанных с промышленной автоматизацией, полиграфией, металлообработкой, инструментально-измерительным оборудованием.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Преобразователь угла поворота вала в напряжение Советский патент 1986 года по МПК H03M1/00
Описание патента на изобретение SU1221748A1
Изобретение относится к измерительной технике и может быть использовано в системах управления исполнительными механизмами.
Цель изобретения — повьппение точ- ности и расширение рабочего диапазона преобразователя.
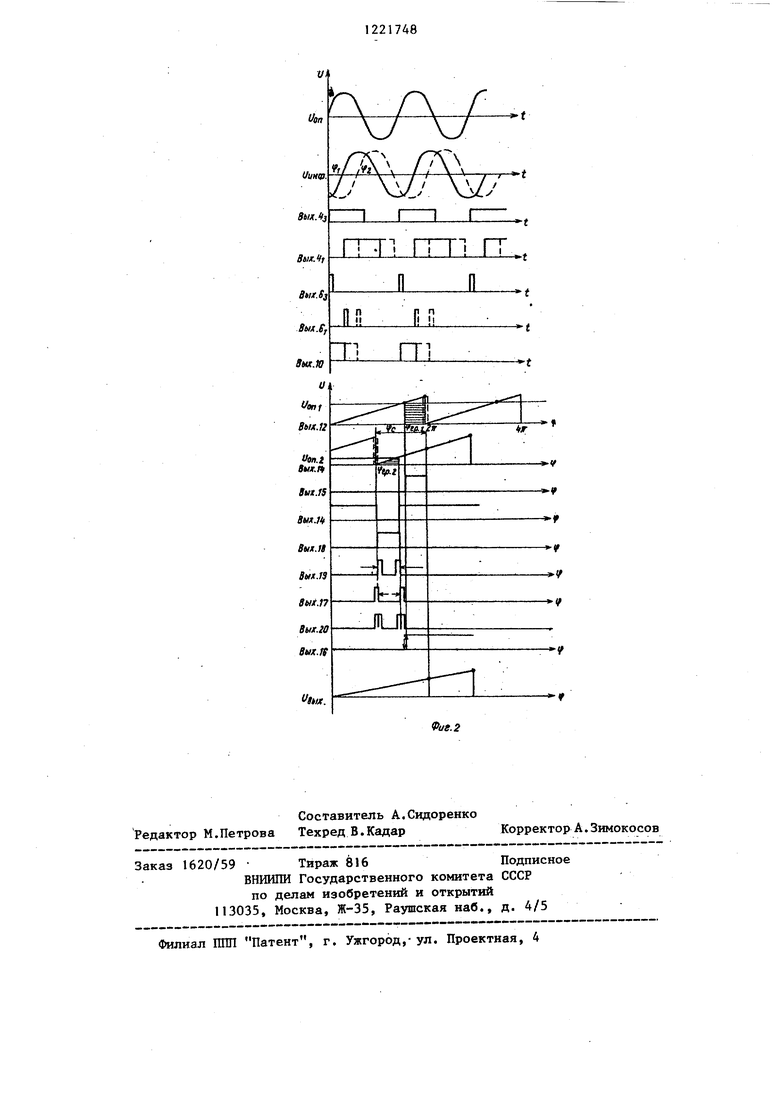
На фиг. 1 приведена структурная схема преобразователя на фиг. 2 — временные диаграммы, поясняющие его работу.
Преобразователь угла поворота вала в напряжение содержит измерительные формирователи 1 и 2 импульсов, опорньш формирователь 3 импульсов, нуль-орган 4, дифференцирующий элемент 5, вентиль 6, фазосдвигающую цепь 7, фазовращатель 8, триггеры 9 и 10, интеграторы П и 12, блок
13переключения каналов, компараторы
14и 15, триггер 16, формирователь 17 импульсов, инвертор 18, формирователь 19 импульсов, элемент ИЛИ 20, реле 21, сумматор 22, источник 23 опорного напряжения.
Преобразователь работает следуюч щим образом.
С выходор фазовращателя 8 на входы измерительного формирователя 1 импульсов и опорного формирователя 3 импульсов поступает соответственно информативное и опорное напряжения синусоидальной формы. При этом информационный сигнал сдвинут по фазе относительно опорного на угол, про- порциональный углу поворота вала сельсина. Одновременно на другой измерительный формирователь 2 импульсо этот же информационный сигнал подается через фазосдвигающую цепь 7, осуществляющую дополнительный сдвиг по фазе.
В момент перехода синусоидального сигнала через нуль из области от- рицательных в область положительных значений на выходах формирователей 1 и 2 импульсов формируются кратковременные импульсы, ;-сдвинутые на время, пропорциональное измеря- емому углу поворота, и на это же время плюс время, соответствующее постоянному сдвигу фазна фазосдвигаНа первом обороте вала при уг
ющей цепи 7. Выходные импульсы формирователей 1 и 2 поступают на S-вхо-55 поворота, величина которых ды триггеров 9 и 10, на R-входы koVo- меньше граничного значения cirp. рых подаются импульсы с выхода опор- напряжение на входе компаратора ного формирователя 3.15 меньше опорного, и сигнал на
На выходе триггера 10 формируется последовательность прямоугольных импульсов, длительность которых прямо- пропорциональна углу поворота вала, а длительность импульсов, формируемых триггером 9, составляет величину:
где Т — временной сдвиг между опорными и измерительным сигналами, соответствующий углу « поворота вала; TU, временной сдвиг, обусловленный фазосдвигающей цепью, обеспечивающей углово сдвиг, равный срр ; Т„ — период гармонического сигнала, питающего фазовращатель.
Выходные сигналы триггеров 9 :и 10 поступают на входы соответствующих интеграторов 11 и 12, в которых длительности сигналов преобразуются в амплитуду постоянного напряжения. Напряжение с выхода интегратора 12 поступает на соответствующий контакт реле 21, а напряжение с выхода интегратора 11 — на вход сумматора 22, где суммируется с напряжением, величина которого соответствует фазовому сдвигу if измерительного напряжения на фазосдвигающей цепи 7, и подается на соответствующий контакт реле 21. Одновременно выходные сигналы интеграторов 11 и 12 поступают на входы блока 13 переключения каналов. Реле 21 переключается сигналом с выхода триггера 16, на S-вход которого подается выходной сигнал компаратора 15, а на R-вход — сигнал с выхода элемента ИЛИ 20, объединяющего сигналы с формирователей 17 и 19 импульсов.
Формирователь 17 импульсов формирует импульс при появлении сигнала единичного уровня с выхода компаратора 14, а формирователь 19 формирует импульс при появлении единичного уровня сигнала на выходе инвертора 18.
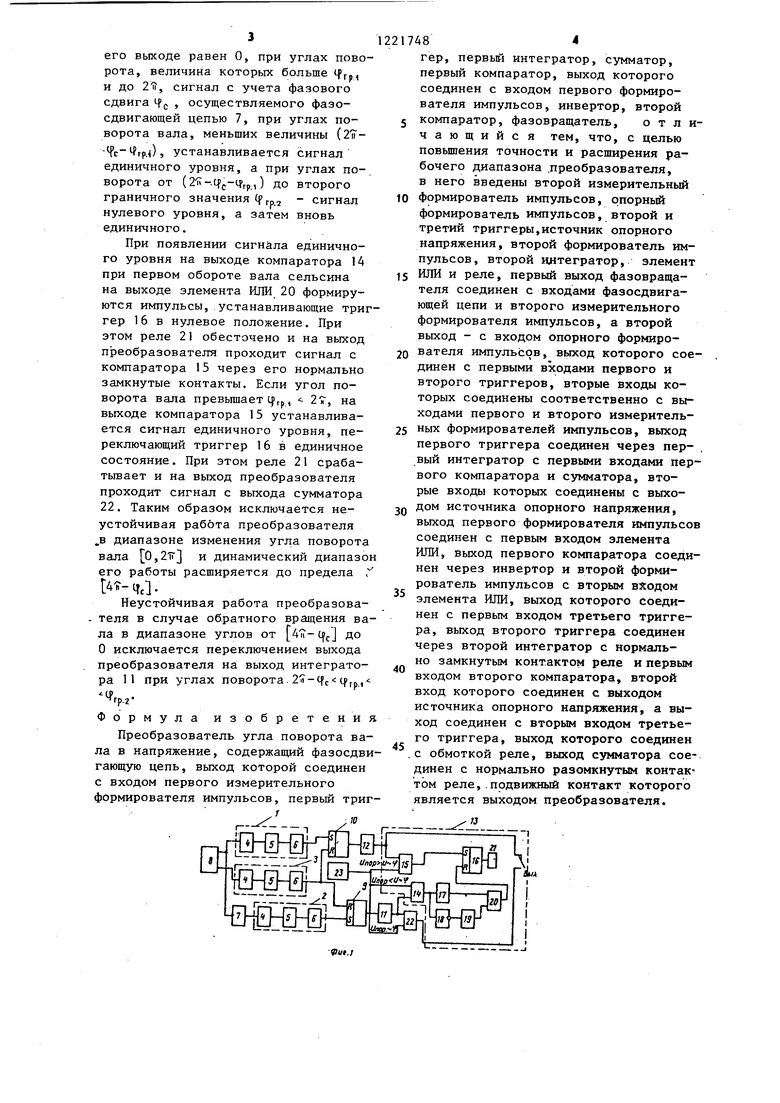
На первом обороте вала при уг поворота, величина которых меньше граничного значения cirp. напряжение на входе компаратора 15 меньше опорного, и сигнал на
его выходе равен О, при углах поворота, величина которьпс больше ifrpi и до 2 if, сигнал с учета фазового сдвига fjN , осуществляемого фазо- сдвигающей цепью 7, при углах поворота вала, меньших величины (2ЧГ- с Ч гр.4), устанавливается сигнал единичного уровня, а при углах поворота от (2 —q j-i|rp.i) ДО второго граничного значения (f гр.2 сигнал нулевого уровня, а затем вновь единичного.
Читайте также: Ко дню святого вале
При появлении сигнала единичного уровня на выходе компаратора 14 при первом обороте вала сельсина на выходе элемента ИЛИ 20 формируются импульсы, устанавливающие триггер 16 в нулевое положение. При этом реле 21 обесточено и на выход преобразователя проходит сигнал с компаратора 15 через его нормально замкнутые контакты. Если угол поворота вала превышает сргр, 27, на выходе компаратора 15 устанавливается сигнал единичного уровня, переключающий триггер 16 в единичное состояние. При этом реле 21 сраба- тьшает и на выход преобразователя проходит сигнал с выхода сумматора 22. Таким образом исключается неустойчивая работа преобразователя в диапазоне изменения угла поворота вала 0,2 и динамический диапазон его работы расширяется до предела 47-4,.
Неустойчивая работа преобразова- теля в случае обратного вращения вала в диапазоне углов от 4 ii — dj до О исключается переключением выхода преобразователя на выход интегратора 11 при углах поворота. 2 M-(fc ifrp-i
Формула изобретения Преобразователь угла поворота вала в напряжение, содержащий фазосдви- гающую цепь, выход которой соединен с входом первого измерительного формирователя импульсов, первый триг,г
гер, первый интегратор, сумматор, первый компаратор, выход которого соединен с входом первого формирователя импульсов, инвертор, второй
компаратор, фазовращатель, отличающийся тем, что, с целью повьппения точности и расширения рабочего диапазона .преобразователя, в него введены второй измерительный
формирователь импульсов, опорньй формирователь импульсов, второй и третий триггеры,источник опорного напряжения, второй формирователь импульсов, второй интегратор, элемент
ИЛИ и реле, первый выход фазовращателя соединен с входами фазосдвига- ющей цепи и второго измерительного формирователя импульсов, а второй выход — с входом опорного формирователя импульсов, выход которого соединен с первыми входами первого и второго триггеров, вторые входы которых соединены соответственно с выходами первого и второго измерительных формирователей импульсов, вьпсод первого триггера соединен через первый интегратор с первыми входами первого компаратора и сумматора, вторые входы которых соединены с выходом источника опорного напряжения, выход первого формирователя импульсов соединен с первым входом элемента ИЛИ, выход первого компаратора соединен через инвертор и второй формирователь импульсов с вторым входом элемента ИЛИ, выход которого соединен с первым входом третьего триггера, выход второго триггера соединен через второй интегратор с нормально замкнутым контактом реле и первым входом второго компаратора, второй вход которого соединен с выходом источника опорного напряжения, а выход соединен с вторым входом третьего триггера, выход которого соединен с обмоткой реле, выход сумматора соединен с нормально разомкнутым контактом реле,.подвижный контакт которого является выходом преобразователя.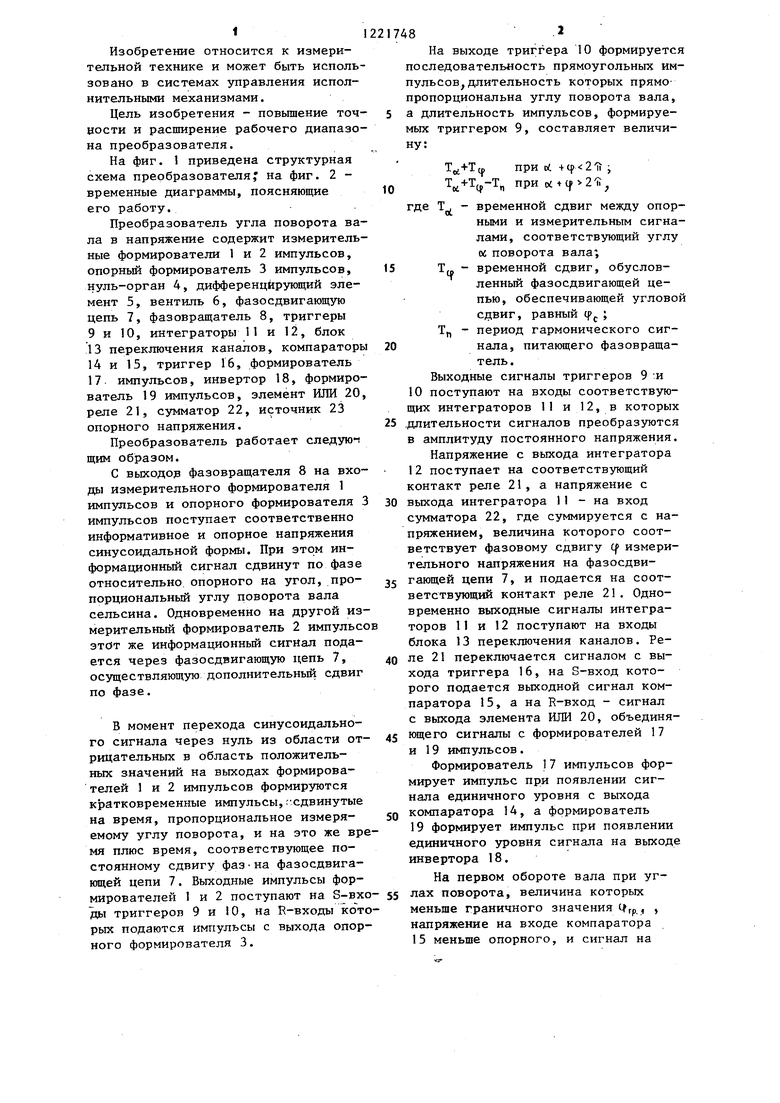
Похожие патенты SU1221748A1
- Абаринов Евгений Георгиевич
- Тихомиров Вячеслав Всеволодович
- Карпов Владимир Александрович
- Смирнов А.К.
- Белов В.И.
- Замолодчиков Е.В.
- Бубнов Алексей Владимирович
- Кавко Владимир Георгиевич
- Мудрик Александр Маркович
- Сутормин Александр Михайлович
- Балакин Рудольф Александрович
- Зушинский Александр Николаевич
- Ковчин Игорь Сергеевич
- Смирнов А.К.
- Белов В.И.
- Замолодчиков Е.В.
- Мурашов Владимир Евгеньевич
- Мартынов Александр Юрьевич
- Смолин Анатолий Сергеевич
- Матвеев Леонид Георгиевич
- Беляков Олег Александрович
- Прокофьева Инна Яковлевна
- Дмитренко Вячеслав Алексеевич
- Розман Григорий Иммануилович
- Рамонис Арунас Антано
- Лесин Николай Александрович
- Минцерис Борис Ильич
- Кулис Ленгинас Ионо
- Гичан Владимир Владимирович
- Дзетавяцкас Романас-Тадас-Казио
- Крищюкайтис Валентинас Антано
- Гордеев Борис Александрович
- Куклина Ирина Геннадьевна
- Охулков Сергей Николаевич
- Бугайский Виктор Васильевич
- Гордеев Андрей Борисович
Иллюстрации к изобретению SU 1 221 748 A1
Реферат патента 1986 года Преобразователь угла поворота вала в напряжение
Изобретение предназначено для использования в системах управления исполнительными механизмами. Целью изобретения является повьшение точности и расширение рабочего диапазона преобразователя. Для этого в преобразователь, содержащий фазосдвига- ющую цепь, первый измерительный формирователь импульсов, первый триггер, первый интегратор, два компаратора, сумматор, фазовращатель, введены второй формирователь импульсов, второй интегратор, элемент ИЛИ, реле, второй измерительный формирователь импульсов, опорный формирователь импульсов, второй и третий триггеры и источник опорного напряжения. На выходах измерительных формирователей импульсов и опорного формирователя им1тульсов из напряжений фазовращателя формируются фазовые импульсы, из которых триггерами формируются временные ворота. Анализируя длительность временных ворот, блок переключения каналов формирует выходные напряжения в широком диапазоне углов поворота вала фазовращателя. 2 ил. (Л
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
- Правообладателям
- Политика конфиденциальности