Доступные файлы (14):
| Лекция_09_Режимы энергосбережения.doc | 77kb. | 29.04.2009 23:18 |  скачать скачать |
| Лекция_10 Конфигурационные биты.doc | 127kb. | 29.04.2009 23:20 | скачать |
| Лекция_11_ ФИД.doc | 275kb. | 28.04.2009 02:30 | скачать |
| Лекция_12_клавиатура (без прерывания).doc | 399kb. | 27.05.2009 01:01 | скачать |
| Лекция_13_клавиатура (с прерыванием).doc | 281kb. | 27.05.2009 01:02 | скачать |
| Лекция_14_дисплей.doc | 568kb. | 18.05.2009 23:32 | скачать |
| Лекция_1.doc | 603kb. | 11.02.2009 10:21 | скачать |
| Лекция_2.doc | 920kb. | 22.02.2009 20:24 | скачать |
| Лекция_3.doc | 1478kb. | 03.03.2009 23:46 | скачать |
| Лекция_4.doc | 455kb. | 31.03.2009 22:23 | скачать |
| Лекция_5 Таймеры.doc | 1912kb. | 07.04.2009 18:59 | скачать |
| Лекция_6 Таймеры_продолжение.doc | 1318kb. | 21.04.2009 22:34 | скачать |
| Лекция_7 Сторож_таймер.doc | 543kb. | 14.04.2009 21:04 | скачать |
| Лекция_8 Прерывания_итог.doc | 538kb. | 23.04.2009 00:20 | скачать |
Видео:Электропривод поворотный для кранов ЭПР3УСкачать

Лекция_11_ ФИД.doc
Формирование кода угла поворота выходного вала привода с использованием фотоимпульсных датчиков.
В электрических следящих приводах с микропроцессорными системами управления для формирования информации об угле поворота выходного вала привода, а в приводах с безредукторным исполнением (с высокомоментными синхронными двигателями) и об угле поворота двигателя, используются фотоимпульсные датчики (ФИД), или как их иначе называют – энкодеры.
ФИД предназначен для преобразования углового положения вала, на котором он установлен, в последовательность электрических сигналов, содержащих информацию о величине и направлении его поворота и пригодных для последующей обработки в устройствах числового программного управления и цифровых САУ.
В основе работы ФИД лежит принцип фотоэлектронного сканирования штриховых растров. В качестве осветителей используются инфракрасные светодиоды, а приемниками излучения служат кремниевые фотодиоды.
Сам ФИД можно схематически представить в виде прозрачного диска, на котором нанесены непрозрачные метки. Располагая с одной стороны диска излучающий ИК диод, а с другой фотодиод, получают возможность генерации импульсов при вращении диска. Для получения возможности определения не только величины угла поворота, но и его направления используют уже два оптических датчика и две последовательности меток. Сигналы, получаемые на выходе оптических датчиков называют последовательностями А и В (см.рис.11.1).

При вращении вала ФИД на его выходе появляется сигнал A, B прямоугольной формы сдвинутые друг относительно друга на 90˚.
На рисунке 11.2 представлены временные диаграммы изменения сигналов на линиях A, B.

Рис.11.2. Временные диаграммы выходных сигналов A, B ФИД (вращение по часовой стрелке).
В качестве примера рассмотрим измерение углового перемещения при помощи ФИД «ЛИР-120А» подключенного к микроконтроллеру ATMega128x(64x). Для формирования цифрового кода угла поворота вала ФИД сигналы А и В подключаем к входным линиям внешних прерываний микроконтроллера INT0, INT1.
В свою очередь внешние прерывания настраиваются на срабатывание как по нарастающему фронту импульса, так и по спадающему. На рисунке 11.3 приведены временные диаграммы выходных сигналов, их логические комбинации и моменты возникновения прерываний.

Рис.11.3. Временные диаграммы выходных сигналов, их логические комбинации и моменты возникновения прерываний.
Сформируем алгоритм подсчета импульсов для определения углового перемещения.
Из анализа рисунка видно, что прерывания по изменению состояния выходных линий возникают в четыре раза чаще, чем период выходного сигнала. Для рассматриваемого ФИД «ЛИР-120А» число штрихов измерительного лимба на оборот равно 1024. То есть при повороте вала ФИД на один оборот на любой из выходных линий (A, B) пройдет 1024 импульса. Значить число прерываний будет соответствовать 4096.
Для определения перемещения необходимо в момент возникновения инкрементировать или декрементировать счетчик перемещения в зависимости от текущего и предыдущего состояния выходной линии A, B.
Рассмотрим более подробно механизм определения направления вращения. Для этого проанализируем диаграмму, приведенную на рисунке 11.4.

Рис. 11.4. Диаграмма состояния выходных линий в зависимости от направления вращения вала ФИД.
Стрелками обозначены направления вращения вала ФИД. Цифры в кружках соответствуют состоянию выходных линий ФИД, где первая цифра – логическое состояние линии A, вторая – линии B. Как видно из рисунка 11.4, при вращении вала по часовой стрелке состояние выходных сигналов меняться по ряду 00, 10, 11, 01, 00…, а при вращении против часовой стрелки наоборот. В квадратах пронумерованы относительные состояния выходных линий ФИД. Их соответственно четыре.
Для определения направления поворота вала ФИД на последнем шаге (интервале между двумя прерываниями) необходимо сравнить текущее состояние выходных сигналов и снятое в предыдущем состоянии. Так например, если в текущем прерывании состояние линий равно 10 [1-ое относительное положение], а предыдущее 11[2], значит вал ФИД повернулся против часовой стрелке и счетчик положения следует декрементировать. Если предыдущее состояние равно 00 [0], то вал повернулся по часовой стрелке и счетчик положения следует инкрементировать.
Читайте также: Противопролежневый матрас всегда ли должен работать компрессор
^ Описание программы формирования цифрового кода угла поворота вала ФИД.
Далее рассмотрим программное обеспечения МК ATMega128x(64x) для определения перемещения вала ФИД «ЛИР-120А». Текст программы расположен в листинге 11.1 .
Для работы программе необходимо две переменных. Переменная FID_Count занимает две ячейки памяти (2 байта) и хранит относительный угол поворота вала ФИД. Изначально она равна 32768 (0х8000). Тогда если величина FID_Count меньше 0х8000, то вал повернулся против часовой стрелки. А если больше – по часовой стрелке. Перемещение вала может составлять ±32768 шагов или ±8 оборотов, так как на один оборот вала ФИД приходится 4096 прерываний по изменению состояния выходных линий A, B. Переменная FID_LastMode используется для хранения предыдущего относительного состояния выходных линий (0, 1, 2, 3). Она необходима для определения направления поворота вала.
Основной частью программы является процедура обработки прерывания по изменению состояния выходных линий ФИД. Программа начинается с объявления таблицы векторов прерываний. Причем внешние прерывания INT0 и INT1 имеют одну подпрограмму обработки FID_IRQ. Она определяет направление поворота вала и соответственно инкрементирует или декрементирует счетчик FID_Count.
Программа начинается с вызова процедур инициализации FID_INIT, FID_CountClear, FID_CountEnable. Рассмотрим более подробно их назначение и структуру.
Процедура FID_INIT настраивает порты INT0(PD0), INT1(PD1) на ввод. По умолчанию все порты микроконтроллера настроены на ввод, но для повышения робастности проектируемого программного обеспечения необходимо в процедуре инициализации настраивать параметры всех используемых устройств ввода/вывода. Так же в процедуре FID_INIT устанавливаются биты ISCn0, ISCn1 определяющие момент возникновения прерывания. Как было отмечено выше, необходимо чтобы прерывания генерировались как по нарастающему, так и по спадающему фронту импульса на выходных линиях ФИД.
Процедура FID_CountEnable разрешает прерывания по изменению сигналов на выходах A, B ФИД. Для этого в регистре масок прерывания EIMSK устанавливаются соответствующие биты (INT0, INT1).
Процедура FID_CountDisable запрещает прерывания по изменению сигналов на выходах A, B ФИД.
Подпрограмма FID_CountClear устанавливает начальные параметры работы ФИД. Устанавливается значение счетчика импульсов датчика FID_Count. Изначально оно равняется 0х8000. Далее по текущему состоянию выходных линий ФИД определяется относительное положение (0, 1, 2, 3) которое присваивается в переменную FID_LastMode. Как было упомянуто выше, она используется для хранения информации о предыдущем относительном положении ФИД.
Основная программа начинается с запуска процедур FID_INIT, FID_CountClear, FID_CountEnable. В ходе их выполнения инициализируются прерывания и устанавливаются значения переменных.
Процедура FID_IRQ основной частью программы является процедура обработки внешних прерываний INT0 и INT1.
Рассмотрим алгоритм ее работы. Она начинается сохранением и заканчивается восстановлением используемого в ней контекста.
Далее в РОН r16 считывается состояние линий A, B. В РОН r17 считываем предыдущее состояние ФИД хранящееся в ячейке FID_LastMode.
Теперь нам необходимо определить в какую сторону повернулся вал ФИД. Для определения направления вращения вала ФИД (по часовой стрелке или против часовой) в памяти программ записана таблица состояний линий A, B — FID_AB_Status. Она хранит последовательность комбинаций линий A, B по относительным состояниям 3, 0, 1, 2, 3, 0. Данная таблица используется для определения предыдущего или следующего состояния линии. Интерпретация таблицы и схема ее использования для определения направления вращения представлены в таблице 11.1.
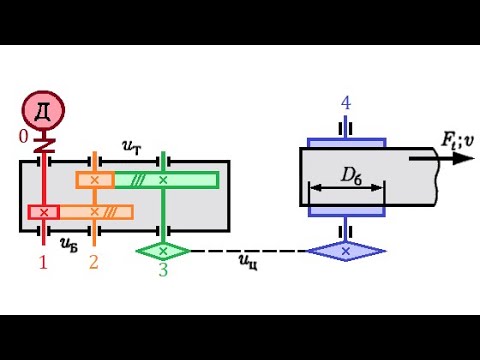
Видео:6.2 Кинематический расчет приводаСкачать
Автомобильный справочник
Видео:Энкодеры. Подробный обзор с экспериментами!Скачать

для настоящих любителей техники
Видео:Солнечный трекер. Слежение за Солнцем без фотодатчиковСкачать

Приводные валы

Крутящий момент, развиваемый двигателем автомобиля, должен передаваться через коробку передач и дифференциал на ведущие колеса, для чего в автомобилях используются приводные валы. При движении автомобиля колеса постоянно перемещаются вверх-вниз, а управляемые передние колеса еще и поворачиваются вправо-влево, что не позволяет применять жесткое соединение приводных валов с другими агрегатами автомобиля. Если двигатель расположен спереди, а ведущие колеса — задние, то в качестве приводного используется вал с карданными шарнирами (карданный вал).

Задача приводного вала — эффективно передавать крутящий момент от одного агрегата к другому, независимо от того, расположены они соосно или со смещением относительно друг друга.
Читайте также: Ремонт подвесного подшипника карданного вала ваз 2107
Приводной вал должен работать в широком диапазоне частоты вращения и при этом обеспечивать возможность достаточно больших взаимных перемещений соединяемых элементов во всех плоскостях. Разнообразие требований к шарнирам приводных валов привело к появлению самых разных вариантов привода.
Видео:9.1 Расчет валов приводаСкачать

История создания приводных валов
Всерьез о трансмиссии задумались создатели первых автомобилей. Сначала общепринятым был привод на задние колеса, так как решить проблемы переднего привода не удавалось. В случае передних ведущих колес крутящий момент должен равномерно передаваться не только при линейном смещении колеса вверх-вниз, но и при повороте колеса из стороны в сторону.
Для заднего привода передача крутящего момента от двигателя к заднему мосту была реализована с помощью продольного вала с карданными шарнирами. Такой подход к решению проблемы был более простым, ведь углы отклонения таких шарниров небольшие и не влияют на ходовые качества автомобиля.
Изобретение карданного шарнира восходит к XVI столетию; авторами считаются итальянец Джероламо Кардано и англичанин Роберт Гук.
В середине XVI века Кардано создал кольцевой шарнир, в котором корабельный компас оставался в горизонтальном положении, несмотря на морскую качку.
В 1664 году Роберт Гук подтвердил патентом, что его кольцевой шарнир способен соединить концы двух несоосных валов, расположенных под углом друг к другу (рис. 2 «Универсальный шарнир Роберта Гука«).

Термины «карданный шарнир» или «шарнир Гука» и сегодня напоминают об этих двух авторах давнего изобретения.
С появлением переднего привода карданные шарниры использовались и там, но в связи с повышением требований к управляемости и динамике автомобиля поиск более оптимальной передачи крутящего момента привел к появлению шарниров равных угловых скоростей (ШРУС).
На современных легковых автомобилях карданный шарнир применяется только на продольном карданном валу привода задних ведущих колес, хотя и здесь постепенно сдает свои позиции. Различия между карданным шарниром и ШРУСом объясняются в следующих главах.
На грузовых автомобилях карданный шарнир по-прежнему используется на продольном карданном валу привода задних колес, а также в виде сдвоенного карданного шарнира — на поперечных приводных валах.
В декабре 1926 года французские инженеры Пьер Фенай и Жан-Альбер Грегуар получили патент на изобретенный ими шарнир Tracta. Этот шарнир состоял из четырех деталей, соединенных скользящими направляющими. Чтобы не распадаться, он должен был постоянно находиться внутри полусферы.
Шарнир изготавливался на обычных универсальных станках и мог использоваться для передачи большого крутящего момента, поэтому во время Второй мировой войны им оснащались многие французские, английские и американские полноприводные автомобили.
Для шарнира Tracta (рис. 3 «Деталировочный чертеж шарнира Tracta») впервые было использовано определение «гомокинетический», которое и по сей день используется для обозначения шарниров равных угловых скоростей. Сам шарнир сегодня уже не применяется.

Как и в Европе, в Америке тоже пытались решить проблему синхронного вращения, и 4 мая 1923 года Карл Вайсс запатентовал разработанный им вариант такого шарнира (рис. 4 «Чертеж к патенту шарнира Вайсса«).
Этот шарнир изготавливался с 1934 года, но его массовый серийный выпуск начался только после Второй мировой войны. До середины 80-х годов прошлого века он применялся на автомобилях Mercedes-Benz.
В то время, как шарнир Вайсса допускал отклонение не более чем на 20° и применялся на автомобилях с задним приводом, шарнир Tracta мог работать уже под углом до 50°.
В современном автомобилестроении шарнир Вайсса, не в последнюю очередь из-за своей большой удельной массы, практически не применяется.

Самый распространенный в настоящее время ШРУС основан на патенте, который получил инженер Ford Альфред Ганс Рцеппа в июне 1933 года (рис. 5 «Чертеж к патенту шарнира Рцеппа«).
Для достижения современного технического уровня потребовалось много исследовательской работы. Главную роль в этом сыграли английская фирма Hardy Spicer и основанная в 1948 году немецкая компания по производству шарниров Lohr&Bulmkamp.
На базе шарнира Рцеппа, который не допускал осевого смещения, эти две фирмы разработали универсальный ШРУС с возможностью продольного перемещения деталей.
Видео:Сервопривод, принцип работы и подключение к АрдуиноСкачать

Системы привода

Большая часть выпускаемых сегодня легковых автомобилей оснащается приводными залами с шарнирами равных угловых скоростей. Отдельные схемы привода ведущих колес показаны с гомокинетическими (от греческого homos = одинаковый и kine = двигаться) шарнирами (рис. 6 «Схемы привода ведущих коле»).
Читайте также: Шестерня коленчатого вала 402
При переднем приводе ведущими являются передние колеса. На приводных валах со стороны колеса применяются жесткие ШРУСы (без возможности продольного перемещения деталей), а со стороны коробки передач — универсальные (с возможностью продольного перемещения). Передние колеса — управляемые, поэтому угол поворота в шарнире со стороны колеса должен достигать примерно 50°.
Из-за поперечного расположения двигателя и связанной с этим асимметрии в моторном отсеке приводные валы могут быть разной длины.
При заднем приводе ведущими являются задние колеса. На приводных валах как со стороны колеса, так и со стороны коробки передач применяются универсальные ШРУСы, поскольку в этом случае шарнир — в отличие от переднего привода — должен компенсировать только изменение длины валов из-за хода подвески вверх-вниз.
При полном приводе ведущими являются все колеса. Шарниры приводных валов применяются точно так же, как на описанных выше переднем и заднем приводах. Крутящий момент от силового агрегата на задние или (при расположенном сзади двигателе) на передние колеса передается с помощью продольного вала.
Частота вращения валов в этом случае может достигать 6000 об/мин, поэтому продольные валы оснащаются высокооборотными шарнирами. Далее отдельные типы шарниров рассматриваются более подробно.
Видео:Ременная передача. Урок №3Скачать

Общие показатели для приводных валов
Наряду с передачей усилия задачей приводных валов является и равномерная передача крутящего момента на ведущие колеса.
Угловая скорость
Приводные валы только с одним шарниром вращаются неравномерно.

Если два вала соединить простым карданным шарниром под определенным углом и вращать вал I с постоянной угловой скоростью ω1 то вал II будет вращаться с неравномерной угловой скоростью ω2 (рис. 7 «Приводные валы с одним шарниром«).
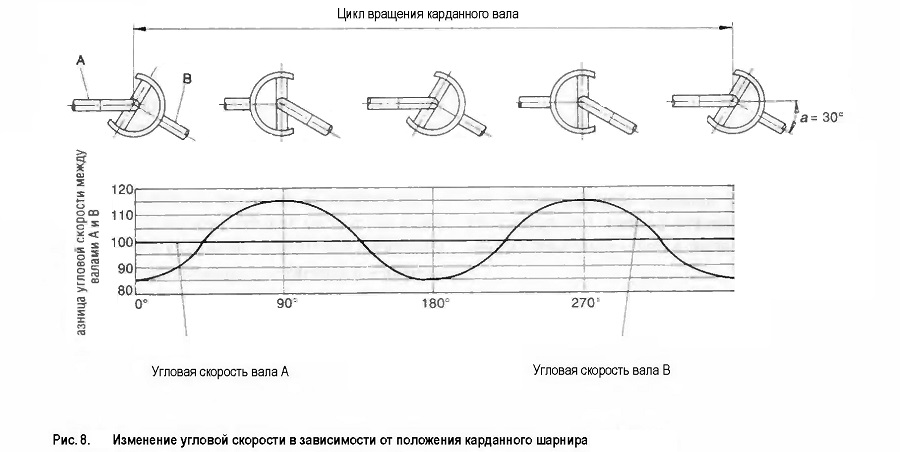
Эта неравномерность, часто называемая погрешностью карданного шарнира, выражается в синусоидальном колебании угловой скорости вала II, как показано на графике цикла вращения 360° (рис. 8 «Изменение угловой скорости в зависимости от положения карданного шарнира«).
При 0°, 180° и 360° вилка шарнира на валу I расположена горизонтально и обладает меньшей угловой скоростью, чем в вертикальных положениях 90° и 270°.
Такое ускорение и замедление крестовины шарнира соответственно изменяет и угловую скорость вала II.
Поскольку решению этой проблемы способствуют угловое и параллельное смещение валов (за счет конструктивно обусловленного расположения элементов трансмиссии и достаточно эластичных опор), карданные валы автомобиля всегда оснащаются двумя шарнирами. Это позволяет компенсировать неравномерности вращения вала.
Максимальный угол в шарнире
Максимальный угол отклонения от горизонтали (рис. 9 «Угол в шарнире«) показывает, под каким углом может работать шарнир, соответствуя требованиям по равномерности передачи крутящего момента и долговечности.
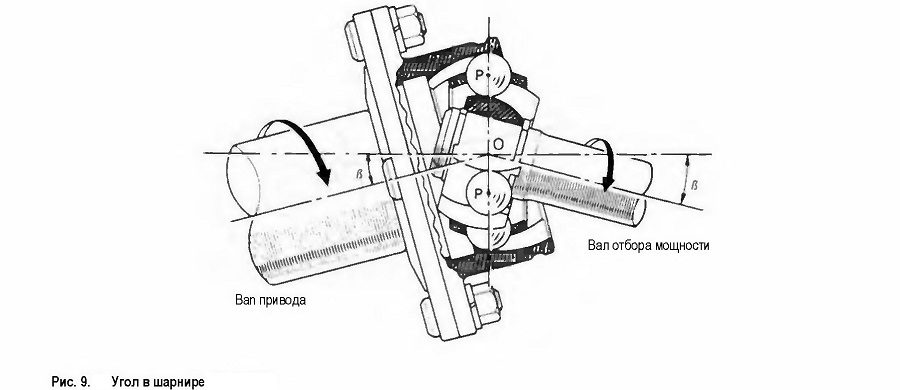
В автомобильной технике максимальный угол в шарнире может составлять более 50°.
Схемы расположения карданных валов
Неизбежно возникающую неравномерность вращения можно компенсировать последовательным размещением двух шарниров на одном валу.
При этом различают два варианта их расположения: Z-схема и W-схема.
Z-схема
Z-схема или Z-изгиб представляет собой наиболее распространенный вариант применения карданного вала. В этом случае изгиб происходит только в одной плоскости (рис. 10 «Z-схема«).
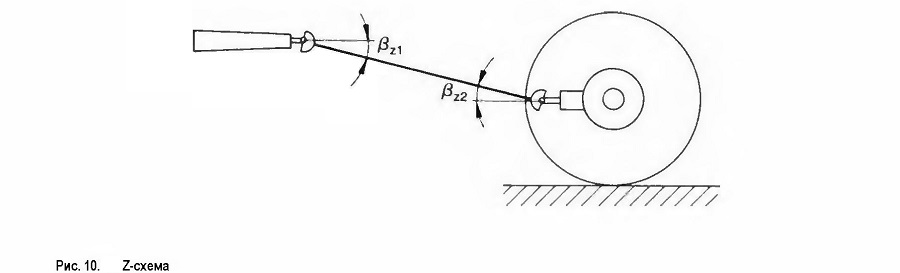
Для абсолютно синхронного вращения ведущего и ведомого валов, соединенных карданным валом, вилки шарниров этого общего вала должны находиться в одной плоскости, а углы в шарнирах должны быть одинаковы.
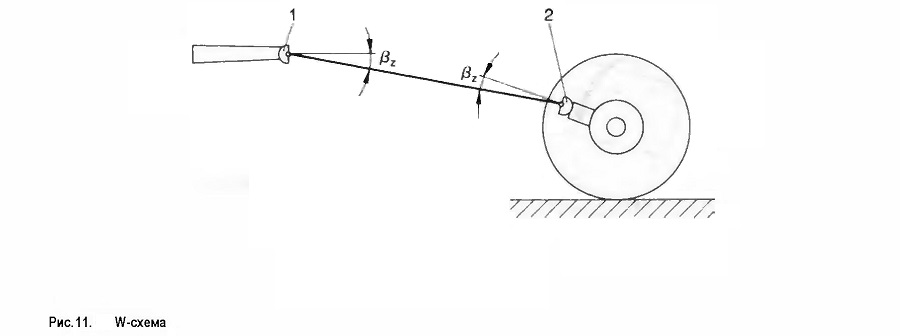
W-схема
Еще одним способом избежать нежелательных колебаний частоты вращения между валами I и II является W-схема их расположения (рис. 11 «W-схема«).
И в этом случае углы в карданных шарнирах должны быть одинаковыми, а их вилки — находиться в одной плоскости.
Общее правило для Z-схемы и W-схемы заключается в том, что карданный вал и соединяемые им концы ведущего и ведомого валов должны лежать в одной вертикальной плоскости.
В случае бокового смещения при использовании Z-схемы достаточно, чтобы пространственный угол оставался минимальным.
Чтобы избежать нежелательных колебаний частоты вращения вала при использовании W-схемы, угол смещения необходимо высчитать заранее (рис. 12 «Боковое смещение«).
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
📸 Видео
Вагнеровцы после обороны Бахмута #shortsСкачать

Электропривод поворотный для кранов ЭПР7УСкачать
ТЕХНИКА БЕЗОПАСНОСТИ. Вид Грубейшего Нарушения ТРЕБОВАНИЙ ТБ при работе на СТАНКАХ.Скачать
Как определить вращение насоса НШ /3 способа/Скачать
Секретные похороны российских военных ПитербургСкачать
Электропривод поворотный для кранов ЭПР7Скачать
Уроки Arduino - управление сервомашинкойСкачать
Электропривод Gruner 363-230-20 универсальный, угол поворота 90 градусов, 20 Нм, 3 Вт, IP54Скачать
Линейный сервоприводСкачать
Энкодер электродвигателя для arduino. Робототехника для начинающихСкачать
Приводы кранов // Прямой эфирСкачать
Серво-привод на 35 кгсм / Servo drive 35 kgcmСкачать
Мощный привод из старого шуруповерта / Powerful drive from an old screwdriverСкачать