
- Arduino и MCP2515 – интерфейс CAN для Arduino
- Arduino и MCP2515: принцип работы, подключение, схема, код
- Модуль MCP2515
- Схема подключения Arduino и MCP2515
- Код программы для взаимодействия Arduino и MCP2515
- Arduino bus can: заставляем микроконтроллер общаться по шине
- Как заставить Arduino общаться по can?
- Варианты применения
- Хакаем CAN шину авто. Виртуальная панель приборов
- CAN сниффер из Arduino Uno
- Подслушиваем запросы с помощью диагностической системы VAG-COM (VCDS)
- Разработка панели приборов на основе Raspberry Pi и 7″ дисплея
- Софт панели приборов на Python и Kivy (UI framework)
- Видео работы цифровой панели приборов на базе Raspberry Pi
- Приложение на телефон Виртуальная панель приборов
Arduino и MCP2515 – интерфейс CAN для Arduino
Arduino и MCP2515: принцип работы, подключение, схема, код
CAN (Controlled Area Network) – это стандарт шины, который позволяет микроконтроллеру и его периферийным устройствам обмениваться данными без необходимости использования хост-устройства или компьютера. Протокол CAN, разработанный Robert Bosch GmbH, в основном используется в автомобилях для связи между блоком управления и его компонентами.

Например, блок управления двигателем является основным средством управления, используемым в автомобиле. Этот блок подключен ко многим датчикам и исполнительным механизмам, таким как механизмы контроля потока воздуха, давления, температуры, управления клапанами, двигатели для контроля воздуха и т. д. Связь между этими модулями и блоком управления осуществляется через шину CAN. В этом проекте мы узнаем о модуле контроллера CAN MCP2515, о том, как связать контроллер шины CAN MCP2515 с Arduino, и, наконец, о том, как обеспечить связь между двумя платами Arduino с помощью двух контроллеров CAN MCP2515 и самого протокола CAN.
Модуль MCP2515
Контроллер шины CAN MCP2515 – это простой модуль, который поддерживает протокол CAN версии 2.0B и может использоваться для связи со скоростью 1 Мбит/с. Для того, чтобы настроить полную систему связи, вам потребуется два модуля шины CAN. Модуль, используемый в проекте, показан на рисунке ниже.

Этот конкретный модуль основан на ИС контроллера CAN MCP2515 и ИС приемопередатчика TJA1050. Микросхема MCP2515 представляет собой автономный контроллер CAN и имеет встроенный интерфейс SPI для связи с микроконтроллерами. Что касается микросхемы TJA1050, она действует как интерфейс между ИС контроллера MCP2515 и физической шиной CAN.
MCP2515 – это основной контроллер, который состоит из трех основных подкомпонентов: модуля CAN, логики управления и блока SPI. Модуль CAN отвечает за передачу и прием сообщений на шине CAN. Логика управления управляет настройкой и работой MCP2515, взаимодействуя со всеми блоками. Блок SPI отвечает за интерфейс связи SPI.
На следующем рисунке показана схема CAN-модуля MCP2515, а также показано, как микросхема MCP2515 и TJA1050 подключены к модулю.

Схема подключения Arduino и MCP2515
На следующем рисунке показана принципиальная схема подключения модуля CAN MCP2515 с Arduino и связь между двумя Arduino по протоколу CAN.

Код программы для взаимодействия Arduino и MCP2515
Прежде чем углубляться в код, вам необходимо скачать библиотеку для модуля MCP2515. Есть много библиотек, но здесь мы использовали эту: https://github.com/Seeed-Studio/CAN_BUS_Shield. Загрузите ее и поместите извлеченное содержимое в каталог библиотек Arduino. Поскольку сеть CAN включает в себя модуль передатчика и модуль приемника, код также делится на код передатчика и код приемника.
Работа этого проекта очень проста, так как вся работа выполняется библиотеками (SPI и CAN). Поскольку CAN является связью на основе сообщений, вам необходимо отправить сообщение в диапазоне от 0 до 8 байтов.

В этом проекте передатчик отправляет сообщение 1 1 2 3 0 5 6 7. Это сообщение передается по шине CAN, и получатель получает это сообщение, что отображается на его последовательном мониторе. Кроме того, 0-й и 4-й биты, то есть 1 и 0 в вышеуказанной последовательности, извлекаются приемником отдельно и включают и выключают светодиод, подключенный к контакту 2 платы Arduino.
Читайте также: Давление в шинах автомобиля ларгус кросс зимой
Arduino bus can: заставляем микроконтроллер общаться по шине
В любой системе управления важно настроить линии связи. Без них не будет работать ни один исполнительный механизм. В электронике много интерфейсов передачи данных; у каждого из них есть свои недостатки и преимущества. Но сегодня хочу рассмотреть интерфейс промышленной связи CAN.
Определение:
CAN – control area network, в переводе звучит что-то вроде «сети устройств управления и связи».
Сети с его использованием можно встретить в различных областях техники, начиная от современных автомобилей – на них с помощью Can шины осуществляется связь между блоками управления автомобилем, а также на промышленных объектах в любой сфере производства.
Микроконтроллеры Arduino can шину в обычном виде не поддерживают – для этого нужно использовать дополнительные блоки преобразования сигналов.
Как заставить Arduino общаться по can?
Во-первых, для связи по ардуины нужно использовать модуль mcp2515 или TJA1050. Это устройство выступает в роли посредника между контроллером и сетью, то есть вы отправляете битовые последовательности на него, указываете адресата, а он перенаправляет данные в нужном порядке и форме.

Связь ардуино и этой платы осуществляется по SPI интерфейсу.
Определение:
SPI – Serial Peripheral Interface, на русском языке это звучит так – последовательный интерфейс периферии.
Для связи нужно четыре цифровых сигнала (соответственно, 4 пина ардуины):
- MOSI – выход ведущего устройства;
- MISO – вход ведущего;
- SCLK – последовательный тактовый сигнал;
- CS (SS) – выбор кристалла или микросхемы (crystal select).

На схеме вы видите, что все сигналы, кроме SS(CS), – общие, а последний индивидуален для каждого устройства в системе, и нужен для определения устройства, с которым ведётся обмен данным. Когда сигнал 0 – устройства взаимодействуют, а когда 1 – нет. То есть управление производится инверсным сигналом, иначе говоря – низким уровнем, об этом свидетельствует полоса над надписью SS, в математике и электронике так обозначаются инвертированные (умноженные на минус единицу) значения чисел.
Для работы Arduino bus can системы нужно использовать соответствующую библиотеку для Arduino ide (https://github.com/Seeed-Studio/CAN_BUS_Shield), а для большего удобства – шилд, кстати, библиотека написана под такой шилд.

Варианты применения
В быту с помощью can шины вы можете построить бортовой компьютер на ардуино или устройство диагностики автомобилей. Для разработчиков умных систем с её помощью можно осуществлять связь между удалёнными блоками вашей системы посредством проводной или радиопередачи данных.
Хакаем CAN шину авто. Виртуальная панель приборов

В первой статье «Хакаем CAN шину авто для голосового управления» я подключался непосредственно к CAN шине Comfort в двери своего авто и исследовал пролетающий траффик, это позволило определить команды управления стеклоподъемниками, центральным замком и др.
В этой статье я расскажу как собрать свою уникальную виртуальную или цифровую панель приборов и получить данные с любых датчиков в автомобилях группы VAG (Volkswagen, Audi, Seat, Skoda).
Читайте также: Какое давление в шинах для рено логан
Мною был собран новый CAN сниффер и CAN шилд для Raspberry Pi на базе модуля MCP2515 TJA1050 Niren, полученные с их помощью данные я применил в разработке цифровой панели приборов с использованием 7″ дисплея для Raspberry Pi. Помимо простого отображения информации цифровая панель реагирует на кнопки подрулевого переключателя и другие события в машине.
В качестве фреймворка для рисования приборов отлично подошел Kivy для Python. Работает без Иксов и для вывода графики использует GL.
- CAN сниффер из Arduino Uno
- Подслушиваем запросы с помощью диагностической системы VAG-COM (VCDS)
- Разработка панели приборов на основе Raspberry Pi и 7″ дисплея
- Софт панели приборов на Python и Kivy (UI framework)
- Видео работы цифровой панели приборов на базе Raspberry Pi
Под катом полная реализация проекта, будет интересно!

Водительская дверь открыта
CAN сниффер из Arduino Uno
Чтобы послушать, что отправляет VCDS в CAN шину я собрал сниффер на макетке из Arduino и модуля MCP2515 TJA1050 Niren.
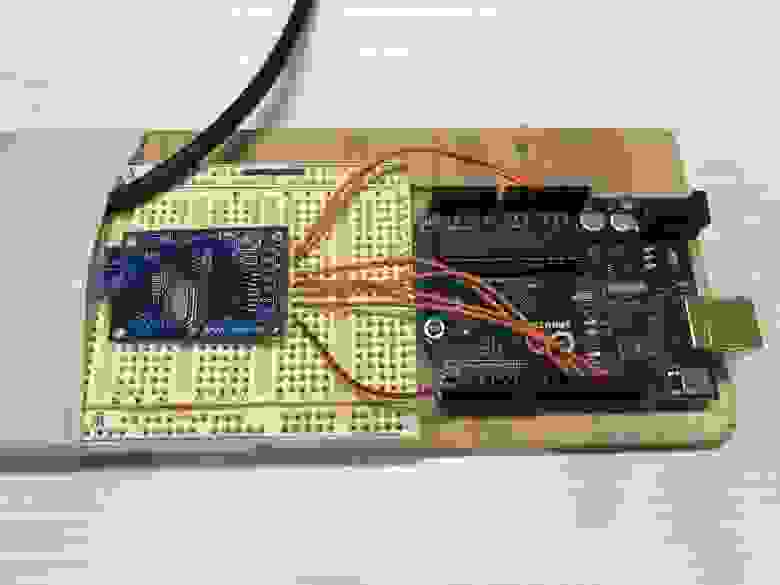
Схема подключения следующая:
Для прослушивания трафика использовал анализатор CanHackerV2 и прошивку arduino-canhacker для Arduino, которая реализует API совместимое с этой программой. Прошивка в гите https://github.com/autowp/arduino-canhacker.
CanHackerV2 позволяет смотреть пролетающий трафик, записывать и проигрывать команды с заданным интервалом, что очень сильно помогает в анализе данных.
Подслушиваем запросы с помощью диагностической системы VAG-COM (VCDS)
Описание VCDS с официального сайта ru.ross-tech.com:
Программно-аппаратный сканер VCDS предназначен для диагностики электронных систем управления, устанавливаемых на автомобилях группы VAG. Доступ ко всем системам: двигатель, ACP, АБС, климат-контроль, кузовая электроника и т.п., считывание и стирание кодов неисправностей, вывод текущих параметров, активация, базовые установки, адаптация, кодирование и т.п.
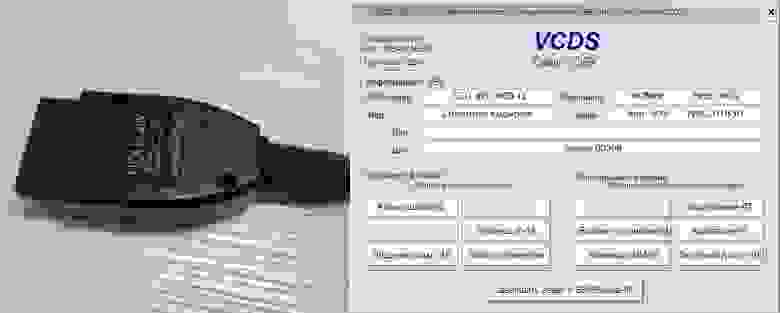
Подключив сниффер к линиям CAN_L и CAN_H в диагностическом шнурке я смог увидеть какие запросы делает VCDS и что отвечает авто.
Особенность авто группы VAG в том, что OBD2 разъем подключен к CAN шине через шлюз и шлюз не пропускает весь гуляющий по сети трафик, т.е. подключившись в OBD2 разъем сниффером вы ничего не увидите. Чтобы получить данные в OBD2 разъёме нужно отправлять шлюзу специальные запросы. Эти запросы и ответы видно при прослушивании трафика от VCDS. Например вот так можно получить пробег.
В VCDS можно получить информацию почти с любого датчика в машине. Меня в первую очередь интересовала информация, которой вообще нет на моей приборке, это:
- температура масла
- какая именно дверь открыта
Скорость, обороты, температура ОЖ, пробег, расход, место в баке и другие запросы я тоже получил, для справки размещу.
Разработка панели приборов на основе Raspberry Pi и 7″ дисплея
В качестве аппаратной части я выбрал Raspberry Pi. Была идея использовать Android планшет, но показалось, что на Raspberry Pi будет проще и быстрее. В итоге докупил официальный 7″ дисплей, и сделал CAN шилд из модуля TJA1050 Niren.

OBD2 штекер использовал от старого ELM327 адаптера.
Читайте также: Шина септальная внутриносовая шина интраназальный сплинт 68х25х1 2

Используются контакты: CAN_L, CAN_H, +12, GND.
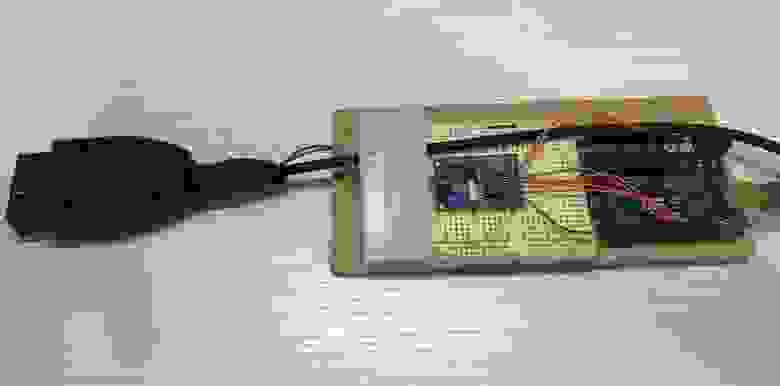
Тесты в машине прошли успешно и теперь нужно было все собрать. Плату дисплея, Raspberry Pi и блок питания разместил на куске черного пластика, очень удачно подобрал пластмассовые втулки, с ними ничего не болтается и надежно закреплено.

Местом установки выбрал бардачок на торпедо, которым я не пользуюсь. По примеркам в него как раз помещается весь бутерброд.

Напильником довел лист черного пластика до размера крышки бардачка, к нему прикрепил бутерброд и дисплей. Для прототипа сойдет, а 3D модель с крышкой для дисплея и всеми нужными крепежами уже в разработке.

Софт панели приборов на Python и Kivy (UI framework)
Параллельно со сборкой самой панели приборов я вел разработку приложения для отображения информации с датчиков. В самом начале я не планировал какой либо дизайн.
Первая версия панели приборов
По мере разработки решил визуализировать данные более наглядно. Хотел гоночный дизайн, а получилось, что-то в стиле 80-х.
Вторая версия панели приборов
Продолжив поиски более современного дизайна я обратил внимание какие цифровые приборки делают автопроизводители и постарался сделать что-то похожее.
Третья версия панели приборов
Ранее, я никогда не разрабатывал графические приложения под Linux поэтому не знал с чего начать. Вариант на вебе простой в разработке, но слишком много лишних компонентов: иксы, браузер, nodejs, хотелось быстрой загрузки. Попробовав Qt PySide2 я понял, что это займет у меня много времени, т.к. мало опыта. Остановился на Kivy — графический фреймворк для Python, простой в понимании с полной библиотекой графических элементов и дающий возможность быстро создать мобильный интерфейс.
Kivy позволяет запускать приложение без Иксов, прямо из консоли, в качестве рендера используется OpenGL. Благодаря этому полная загрузка системы может происходить за 10 секунд.
Алгоритм работы следующий, используется 3 потока:
- В главном потоке работаем с графическими элементы (спидометр, тахометр, часы, температуры и др) на экране
- Во втором потоке каждые 5 мс делаем опрос следующего датчика
- В третьем потоке слушаем CAN шину, получив ответ парсим его и обновляем соответствующий графический элемент
Работает стабильно, самый долгий процесс в разработке был связан с рисованием дизайна. На данный момент обкатываю решение и потихоньку пишу мобильное приложение для iOS, чтобы любой мог попробовать цифровую панель приборов.
Проект цифровой панель приборов открытый. Рад буду предложениям и комментариям!
Видео работы цифровой панели приборов на базе Raspberry Pi
Приложение на телефон Виртуальная панель приборов
Для телефона написал приложение — виртуальная панель приборов, данные от машины передаются через ELM327 Wi-Fi адаптер. Адаптер подключается в OBD2 разъем, делает запросы по CAN шине и возвращается ответы в приложение по Wi-Fi.
Приложение VAG Virtual Cockpit уже в AppStore. Пока, что только под iPhone/iPad, но Android версия планируется. Приложение решил сделать платным с минимальной символической стоимостью.
Если есть желание поддержать проект, то вот ссылка на приложение, принимаю любые замечания и предложения!
VAG Virtual Cockpit
- Свежие записи
- Нужно ли менять пружины при замене амортизаторов
- Скрипят амортизаторы на машине что делать
- Из чего состоит стойка амортизатора передняя
- Чем стянуть пружину амортизатора без стяжек
- Для чего нужны амортизаторы в автомобиле
- Правообладателям
- Политика конфиденциальности