
В данной статье рассматривается наиболее простой способ подключения мотора постоянного тока к Arduino.
- Введение
- Необходимые компоненты
- Схема подключения
- Программинг
- Результаты
- Использование ШИМ для регулировки скорости мотора
- Схема подключения
- Результат
- Управление двигателем постоянного тока с применением драйвера L298N и Arduino UNO
- Введение
- Управление двигателем при помощи Arduino и сгенерированным сигналом ШИМ
- Управление двигателем постоянного тока с использованием Н-моста
- Что представляет собой драйвер L298N?
- Принцип управления двигателем при помощи Arduino и драйвера L298N
- Простой пример работы Arduino с драйвером L298N
Введение
Моторы постоянного тока нельзя подключать напрямую к Arduino. Это обусловлено тем, что пины не способны выдавать ток более 40 мА. Мотору же, в зависимости от нагрузки, необходимо несколько сотен миллиампер. Потому возникает потребность увеличения мощности. Делается это, как-правило, с помощью транзисторов.
В статье «Транзисторы: схема, принцип работы, чем отличаются биполярные и полевые» можно ознакомиться с основными типами транзисторов и их принципами работы.
Так же рекомендуется посмотреть: Видеоуроки по Arduino, 5-я серия — Моторы и транзисторы. В данном уроке Джереми Блюм рассказывает о подключении мотора постоянного тока к Arduino через биполярный транзистор.
Необходимые компоненты
Мы рассмотрим вариант взаимодействия с полевым транзистором. Принципы подключения мотора будут разобраны на конкретном железе: DC-мотор, плата Arduino, N-канальный полевой транзистор, резистор на 10 кОм (R1), резистор на 220 Ом (R2).
Вы же в своих экспериментах вольны использовать то, что есть в наличии. Важны лишь 3 условия:
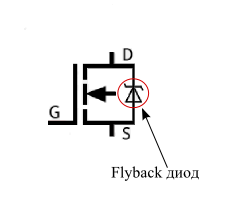
Схема подключения
По-сути, обмотка мотора представляет собой катушку индуктивности. В момент подачи напряжения возникнет обратная электродвижущая сила, которая может вывести из строя транзистор. Flyback диод устанавливается в обратном направлении и предотвращает утечку тока с мотора на транзистор. Поэтому, если в транзисторе нет flyback диода, его необходимо установить дополнительно: анод на исток, катод на сток.
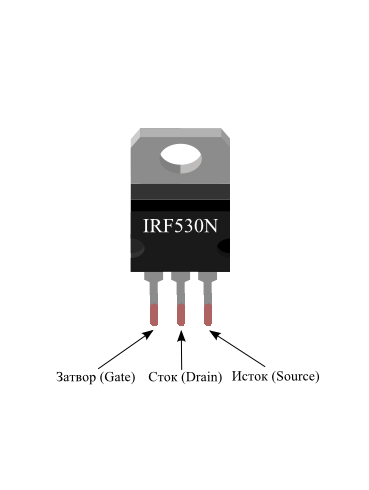
Транзистор IRF530N является мощным и поставляется в корпусе TO-220. Ниже приведена его распиновка.
В данной схеме транзистор будет работать в ключевом режиме: по одной команде (установка уровня HIGH на затворе) от Arduino транзистор будет подключать мотор к источнику питания (отпираться), по другой команде (установка уровня LOW на затворе) — отключать мотор от источника питания.
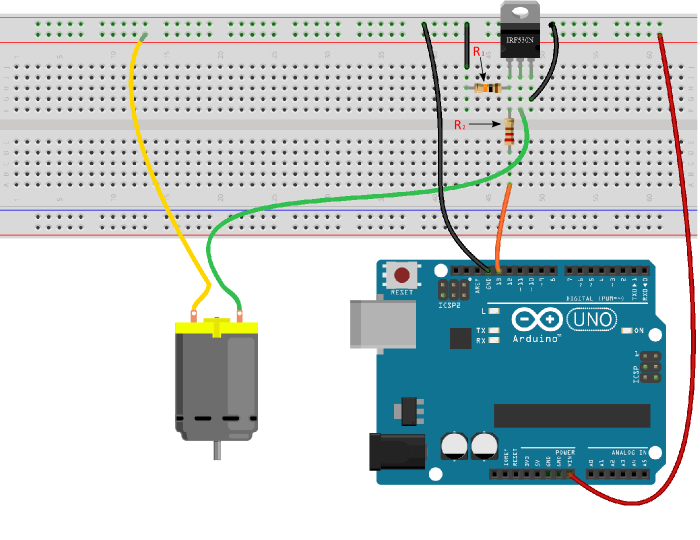
Резистор R1 подтягивает к земле затвор транзистора. Номинал не принципиален — можно использовать любые резисторы в диапазоне от 1 до 10 кОм. Резистор R2 служит для защиты пина микроконтроллера. Диапазон, примерно, от 10 до 500 Ом.
Чтобы запитать данную схему, можно подключить к Arduino внешний источник питания на 6-9 В, либо подать питание непосредственно на макетную плату ( синяя шина — минус, красная шина — плюс).
Программинг
Для наибольшей простоты воспользуемся, пожалуй, самым известным скетчем из готовых примеров — Blink.
Цифровой пин 13 раз в секунду меняет своё состояние. Когда на выходе устанавливается значение HIGH — загорается светодиод и начинает вращаться мотор. Когда устанавливается LOW — светодиод гаснет, а мотор останавливается.
Результаты
Была получена возможность подключать к выводам Arduino мощные устройства, в частности, моторы постоянного тока.
Использование ШИМ для регулировки скорости мотора
Если мотором управлять ничуть не сложнее, чем светодиодом, то, наверное можно изменять яркость скорость вращения мотора точно так же, как при работе со светодиодами? Именно так! С точки зрения Arduino абсолютно не важно с чем мы имеем дело.
Как вы уже, наверно, могли догадаться, для изменения скорости вращения мотора нам понадобится скетч Fade.
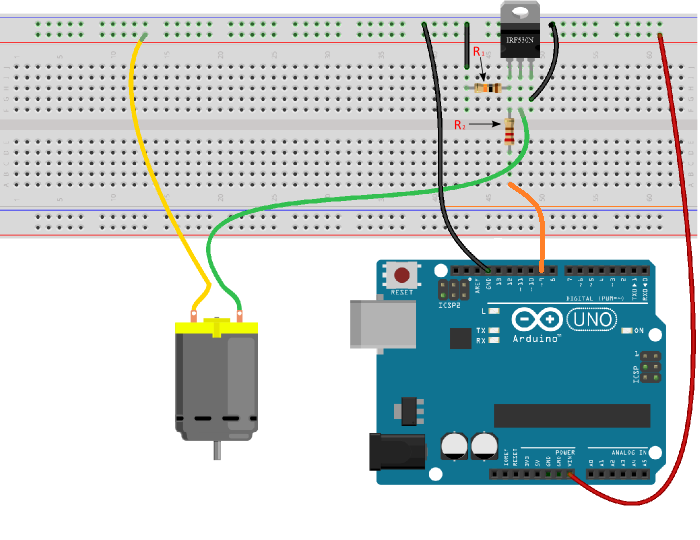
Схема подключения
Чтобы использовать возможности функции analogWrite(..) , нам придётся перейти на один из пинов (3/5/6/9/10/11), поддерживающих аппаратный ШИМ. Поскольку, по умолчанию, в скетче Fade задействован 9-й пин, остановим свой выбор на нём.
Результат
Была получена возможность изменять скорость вращения мотора, используя аппаратный ШИМ Arduino.
На чём данная статья подходит к завершению. Теперь вы смело можете использовать моторы постоянного тока в своих проектах!
Управление двигателем постоянного тока с применением драйвера L298N и Arduino UNO
В данном примере мы рассмотрим один из способов управления электродвигателем постоянного тока, который осуществляется посредством платы Arduino и драйвера L298N. Несмотря на большое многообразие вариантов управления работой электрических машин постоянного тока, куда большей популярностью пользуется именно эта схема. Так как с ее помощью можно осуществлять достаточно широкий спектр различных операций, в сравнении со схемами, использующими другие драйвера и микроконтроллеры.
Читайте также: Мотор вольво 2 литра бензин
Введение
Электрическая машина постоянного тока является одной из самых простых в эксплуатации, благодаря чему ее так часто применяют в устройствах радиоэлектроники и робототехники. Такая популярность обусловлена простотой питания и управления – для этого подаются два полюса от источника эдс (отрицательный и положительный), и при протекании тока по обмоткам происходит вращение вала. При смене полярности двигатель совершает реверсивное движение.
В системах радиоэлектроники такие способы управления работой двигателя получили название широтно-импульсной модуляции (ШИМ). Такой процесс характеризуется изменением продолжительности подаваемого напряжения или формы его сигнала.
Как можно изменять скорость вращения при помощи ШИМ?
Применяя способ ШИМ, вы производите попеременную подачу и отключение напряжения на обмотки двигателя с большой частотой. Частота импульсов при этом может достигать нескольких килогерц.
Величина среднего напряжения, подаваемого на двигатель, напрямую зависит от формы сигнала ШИМ . Форма сигнала, в свою очередь, определяется рабочим циклом, который можно представить в виде отношения времени подачи сигнала к общему периоду (сумме времени подачи напряжения и его отключения). В результате получается безразмерная величина, которую выражают в процентном отношении – сколько времени от общего периода напряжение подавалось на двигатель. В слаботочных системах на 5, 12, 24 или 36 В применяется цикл на 25%, 50%, 75% и 100%.

Широтно-импульсная модуляци
Управление двигателем при помощи Arduino и сгенерированным сигналом ШИМ
Для запуска процесса плата генерирует сигнал, который подается на обмотки двигателя. Чтобы контролировать величину подаваемого сигнала в рабочую схему включается транзистор. Который включается в разрыв питающей сети, а на его базу подается управляющий импульс от Arduino. Задавая определенные параметры работы набором команд для Arduino, транзистор будет переходить в открытое, закрытое или приоткрытое состояние.
На рисунке ниже вы можете увидеть пример схемы, на которой питание двигателя контролируется Arduino через транзистор. Как видите, здесь от ШИМ выхода подается сигнал на базу транзистора, а через его коллектор и эмиттер будет подаваться напряжение на обмотку.

Принципиальная схема управления dc мотором
Программирование ардуино может выполняться с помощью компьютера, для этого используются как специальные утилиты, так и классические языки программирования. При программировании работы устройства вы можете использовать стандартный набор команд, который предоставит доступ к наиболее простым командам. Или собирать их в комбинации для формирования специфической логики работы устройства.
Пример программных команд для работы вышеприведенной схемы включения Arduino вы можете скачать по ссылке ниже. Применяя их, вы сможете управлять скоростью вращения, постепенно наращивая ее до максимального значения, и так же плавно снижая до полной остановки.
Используемые команды:
- void setup – поле для установки рабочего выхода с ШИМ порта;
- void loop – поле для формирования рабочего процесса;
- motorSpeed – задает скорость вращения двигателя;
- analogWrite – задает работу конкретного вывода платы;
- delay – устанавливает величину временного промежутка.
При помощи этой программы и вышеприведенной схемы вы сможете легко изменять скорость вращения двигателя постоянного тока, но менять направление его вращения будет достаточно сложно. Так как потребуется изменить направление протекание электрического тока по обмоткам. Поэтому менять направление вращения куда удобнее при помощи Н-моста на полупроводниковых преобразователях.
Управление двигателем постоянного тока с использованием Н-моста
Если рассмотреть принцип действия, то Н-мост представляет собой логическую схему из четырех логических элементов (релейного или полупроводникового типа), способных переходить в два состояния (открытое и закрытое). В данном примере рассматривается мост собранный на полупроводниках. Простым изменением попарного состояния этих элементов двигатель будет вращаться то в одну, то в другую сторону без необходимости переключения его контактов.
Читайте также: Мотор 2 5 bac
Свое название данное устройство получило за счет внешнего сходства с буквой «Н», где каждая пара транзисторов находится в вертикальных элементах буквы, а непосредственно сам управляемый мотор в горизонтальном. Пример элементарного Н-моста из четырех транзисторов приведен на рисунке ниже. Попарно открывая и закрывая нужные элементы схемы, вы сможете пропускать ток через обмотки в противоположных направлениях.

Схема H-моста
Посмотрите на рисунок, в этой схеме управление питанием двигателя происходит от выводов А и В, на которые подается управляющий потенциал.
Принцип определения направления вращения в Н-мосте происходит следующим образом:
- при подаче на базы транзисторов Q1 и Q4 импульса для открытия перехода происходит протекание тока по обмоткам двигателя в одном направлении;
- при подаче на базы транзисторов Q2 и Q3 импульса для открытия перехода ток будет протекать в противоположном направлении, в сравнении с предыдущим и произойдет реверсивное движение;
- попарное открытие транзисторов Q1 и Q3, Q2 и Q4 приводит к торможению ротора;
- открытие транзисторов в последовательности Q1 и Q2 или Q3 и Q4 совершенно недопустимо, поскольку оно приведет к возникновению короткого замыкания в цепи.
Применяя схему Н-моста для управления работой двигателя постоянного тока, вы сможете реализовать полный набор операций для электрической машины без необходимости переподключения ее выводов. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Среди них наиболее популярными являются драйверы L293D и L298N.
Сравнивая оба драйвера, следует отметить, что L298N превосходит L293D как по параметрам работы, так и по доступным опциям. Несмотря на то, что L293D более дешевая модель, L298N, ввиду значительных преимуществ, стал использоваться куда чаще. Поэтому в данном примере мы рассмотрим принцип управления двигателем при помощи драйвера L298N и платы Arduino.
Что представляет собой драйвер L298N?
Данная плата содержит микросхему и 15 выходов для генерации управляющих сигналов. Предназначено для передачи сигналов к рабочим элементам индуктивного типа – обмоткам двигателя, катушкам реле и т.д. Конструктивно L298N позволяет подключать в работу до двух таких элементов, к примеру, через нее можно одновременно управлять двумя шаговыми двигателями.
На схеме ниже приведен пример распределения выводов L298N от рабочей микросхемы.

L298N. Выводы
- Vss – вывод питания для логических цепей в 5В;
- GND – нулевой вывод (он же корпус);
- INPUT1, INPUT 2, INPUT 3, INPUT 4 – позволяют плавно наращивать и уменьшать скорость вращения двигателя;
- OUTPUT1, OUTPUT2 – выводы для питания первой индуктивной нагрузки;
- OUTPUT3, OUTPUT4 – выводы для питания второй индуктивной нагрузки;
- Vs – вывод для переключения питания;
- ENABLE A, B – выводы, при помощи которых осуществляется раздельное управление каналами, могут устанавливать активный и пассивный режим (с регулируемой скоростью вращения и с установленной);
- CURRENT SENSING A, B – выводы для установки текущего режима.
Принцип управления двигателем при помощи Arduino и драйвера L298N
Благодаря наличию в драйвере L298N встроенного моста данная плата позволяет осуществлять одновременное управление сразу двумя электрическими машинами от двух пар выводов. Логическая схема в данном устройстве работает от напряжения в 5В, а питание самих электрических машин можно осуществлять до 45В включительно. Максимально допустимый ток для одного канала платы составляет 2А.
Как правило, этот драйвер имеет модульное исполнение, за счет чего в комплект модуля уже включены рабочие элементы, выводы и разъемы, необходимые для передачи управляющих сигналов. Пример такого драйвера показан на рисунке ниже:
Читайте также: Как проверить клапан леан берн мотор 7а
Теперь разберем, как осуществляется управление двигателем с помощью драйвера L298N. Подключение двигателя производится к винтовым клеммным зажимам – по паре для питания каждого моторчика. Остальные клеммные зажимы предназначены для подачи питания плюс и минус, а также получения пониженного напряжения (на них подается определенный уровень питающего напряжения, от которого работают двигатели, а внутренний преобразователь понижает его до 5В для собственных логических цепей). Штекерные выводы платы осуществляют широтно-импульсную модуляцию при формировании рабочих сигналов.

Зажимы, куда подключать моторы
Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше. Этот выход можно использовать для запитки того же Ардуино или для любых других устройств, которые питаются от 5В.
Немаловажным моментом для получения 5В от этого клеммного вывода является установка черной перемычки, которая отвечает за преобразование отличного от 5 В уровня напряжения, при условии, что его уровень ниже 12В. Если уровень питающего напряжения выше 12В, перемычку необходимо снять, так как внутренний преобразователь на него не рассчитан, а сама плата должна запитываться от 5В через третий вывод этого же клеммника.
Простой пример работы Arduino с драйвером L298N
Сейчас мы рассмотрим пример простой схемы совместного использования Arduino и L298N. Такой вариант позволяет управлять скоростью вращения вала и его направлением у двигателя постоянного тока. Для этого задается специальная программа на ПК, которая будет определять генерацию ШИМ сигнала от L298N и направление протекания электрического тока через Н-мост. Разумеется, для формирования схемы потребуются еще несколько дополнительных компонентов, которые позволят соединить между собой драйвер, Ардуино, компьютер и двигатели.

Схема совместного использования Arduino и L298N
Перечень необходимых компонентов для сборки схемы:
- Arduino UNO — наиболее простая модель из линейки, но его функционала будет более чем достаточно. Если вы используете более продвинутый вариант, то он также хорошо справится с этой задачей.
- Драйвер L298N – не самый доступный драйвер, но заменить его другим не получится, так как принцип работы похожих моделей может в корне отличаться.
- Двигатель на 12 В – в данном примере используется электрическая машина постоянного тока.
- Потенциометр 100 кОм.
- Кнопка для коммутации цепи.
- Источник питания 12 В — может подойти любой вариант, включая несколько пальчиковых батареек.
- Плата для установки элементов.
- Соединительные провода, желательно с готовыми штекерами папа/мама.
| Компонент | Спецификация | Количество | Где купить |
|---|---|---|---|
| Arduino | UNO Rev3.0 | 1 | Ссылка |
| Драйвер | L298N | 1 | Ссылка |
| Мини-двигатель | 12В, DC, 6000 об/мин. | 1 | Ссылка |
| Блок питания | 12 Вольт | 1 | Ссылка |
| Кнопка | Micro SMD SMT | 1 | Ссылка |
| Потенциометр | 100 кОм | 1 | Ссылка |
| Соединительные провода | папа-мама | Ссылка |
Практическое применение.
Программирование работы электрическими двигателями широко используется в робототехнике, к примеру, ваше изобретение, оснащенное колесами, сможет осуществлять движение и в прямом, и в обратном направлении. Как вы могли уже убедиться, совместная работа Arduino и драйвера L298N сможет без проблем решить такую задачу. При этом вы можете обеспечить одновременную работу сразу двух двигателей от одного драйвера, то есть управлять сразу двумя колесами, причем независимо друг от друга.
В другом варианте двигатели, управляемые Arduino и драйвером L298N могут перемещать руки робота в прямом и реверсивном направлении, передвигаться по линейной траектории и т.д. Полный перечень возможностей платы Arduino и драйвера L298N ограничивается только вашей собственной фантазией, поэтому вы можете самостоятельно найти им интересное применение.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала


