
Двигатель постоянного тока – это наиболее часто используемый тип двигателя в робототехнике и электронных устройствах. Для управления скоростью вращения такого двигателя можно использовать различные методы, но в этом проекте мы будем использовать для этой цели широтно-импульсную модуляцию (ШИМ). Управлять скоростью вращения двигателя постоянного тока мы будем с помощью потенциометра, поворачивая его ручку.

- Общий принцип использования ШИМ
- Необходимые компоненты
- Схема устройства
- Объяснение работы программы
- Arduino — двигатель постоянного тока
- Необходимые компоненты
- Процедура
- Меры предосторожности
- Spin ControlArduino Code
- Код для заметки
- Результат
- Контроль скорости двигателя
- Arduino Code
- Код для заметки
- Результат
- Контроль направления вращения
- Необходимые компоненты
- Процедура
- Шаги подключения
- Arduino Code
- Результат
- Управление двигателем постоянного тока с помощью Arduino и ИМС L298
- Распиновка микросхемы L298 (вид сверху)
- Необходимые комплектующие
- Сборка
- Видео
- Видео
Видео:Уроки Arduino. Управление моторами с библиотекой GyverMotorСкачать

Общий принцип использования ШИМ
Управляя скоростью модуляции ШИМ (Pulse Width Modulation, PWM) можно регулировать, к примеру, силу свечения светодиода – данный принцип пояснен на следующем рисунке. Аналогичный механизм используется и для управления скоростью вращения двигателя.
Если на представленном рисунке выключатель будет замкнут на протяжении некоторого времени, то на протяжении этого же времени лампочка будет гореть. Если переключатель будет замкнут в течение 8ms и будет разомкнут 2ms в течение интервала 10ms, тогда лампочка будет гореть только в течение интервала 8ms. В рассмотренном примере можно сказать, что среднее выходное напряжение (на лампочке) будет составлять 80% от напряжения батареи.
В другом случае выключатель замыкается на 5ms и размыкается на эти же самые 5ms в течение интервала 10ms, таким образом среднее напряжение на лампочке будет составлять 50% от напряжения батареи. Принято говорить, что если напряжение батареи 5В и цикл занятости составляет 50%, то среднее напряжение на оконечном устройстве (лампочке) будет составлять 2.5В.
В третьем рассмотренном на рисунке случае цикл занятости составляет 20% и поэтому среднее напряжение на оконечном устройстве (лампочке) будет составлять 20% от напряжения батареи.
Применяя все сказанное к рассматриваемому нами примеру управления скоростью вращения двигателем можно сказать, что чем больше будет коэффициент заполнения ШИМ (отношение длительности ON состояния к периоду), тем выше будет скорость вращения двигателя.
Видео:Уроки Arduino - управление бесколлекторным моторомСкачать

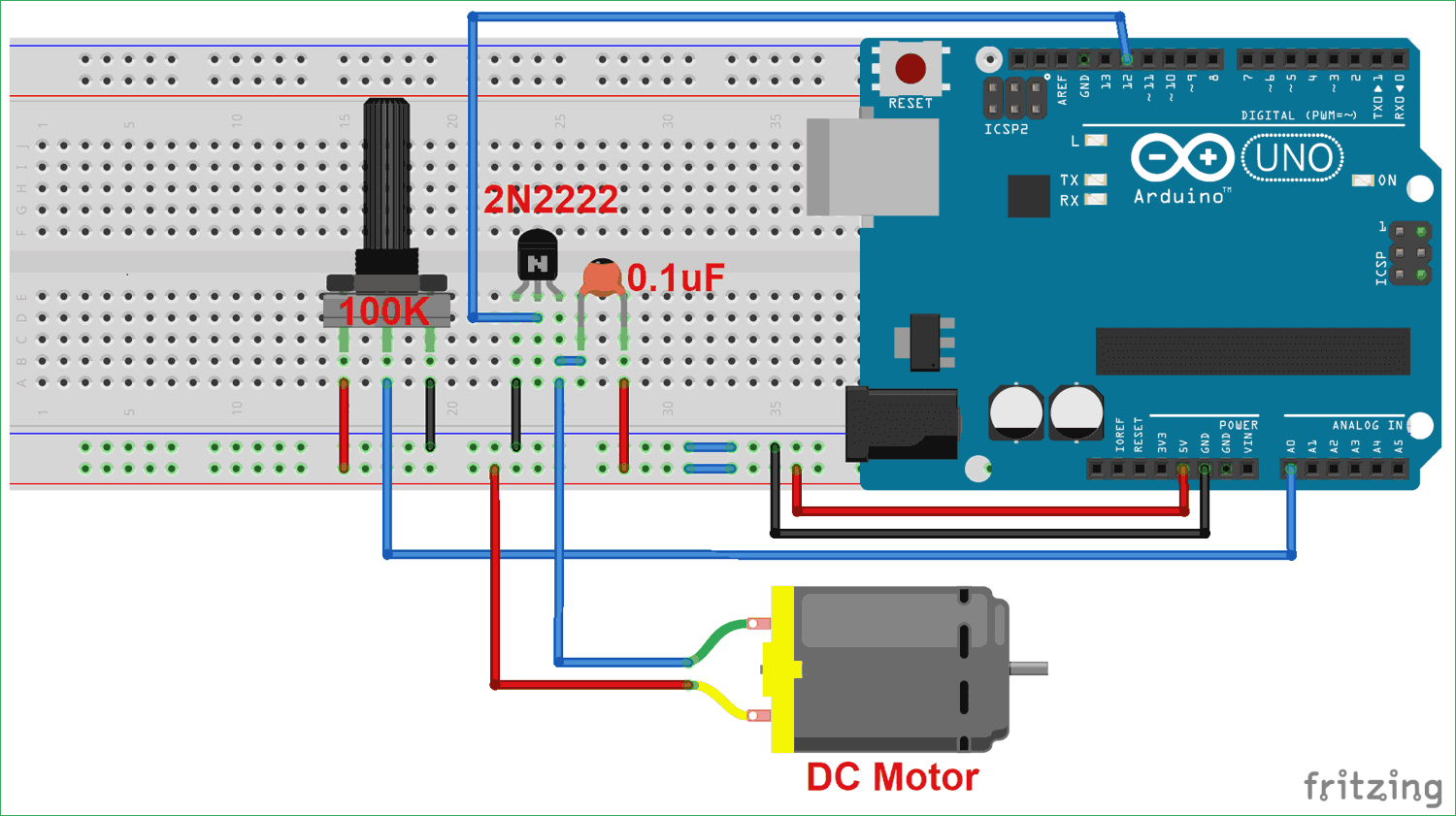
Необходимые компоненты
- Плата Arduino UNO (купить на AliExpress).
- Двигатель постоянного тока.
- Транзистор 2N2222 (купить на AliExpress).
- Потенциометр 100 кОм (купить на AliExpress).
- Конденсатор 0.1 нФ (купить на AliExpress).
- Макетная плата.
- Соединительные провода.
Видео:Управление моторами с ArduinoСкачать

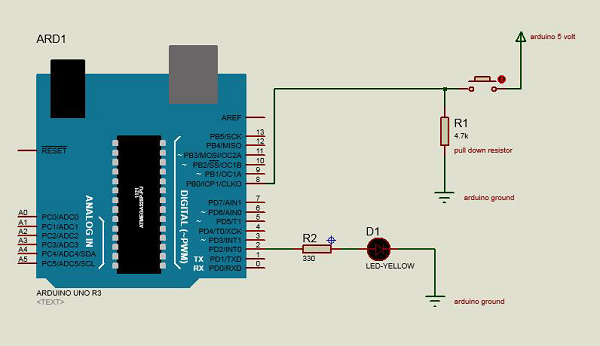
Схема устройства
Представлена на следующем рисунке.
Видео:Управление двигателем постоянного тока. Схема управления мотором Ардуино проекты.Скачать

 Объяснение работы программы
Объяснение работы программы
 Объяснение работы программы
Объяснение работы программыПолный текст программы приведен в конце статьи, в этом разделе объяснено назначение ключевых элементов кода.
В ниже представленных строчках кода мы инициализируем переменные c1 и c2 и назначаем аналоговый контакт A0 выходу потенциометра, а 12-й контакт будем использовать для ШИМ.
Видео:ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]Скачать
![ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]](https://i.ytimg.com/vi/jJQwmnyfw5k/0.jpg)
Arduino — двигатель постоянного тока
В этой главе мы будем связывать различные типы двигателей с платой Arduino (UNO) и покажем вам, как подключить двигатель и управлять им с вашей платы.
Есть три разных типа двигателей —
- Двигатель постоянного тока
- Серводвигатель
- Шаговый двигатель
Двигатель постоянного тока (двигатель постоянного тока) является наиболее распространенным типом двигателя. Двигатели постоянного тока обычно имеют только два провода, один положительный и один отрицательный. Если вы подключите эти два провода напрямую к аккумулятору, двигатель будет вращаться. Если вы переключите провода, двигатель будет вращаться в противоположном направлении.

Предупреждение. Запрещается приводить двигатель в движение непосредственно от выводов платы Arduino. Это может повредить доску. Используйте схему драйвера или IC.
Читайте также: Гнет ли клапана 112 мотор
Мы разделим эту главу на три части —
- Просто сделай мотор крутится
- Контроль скорости двигателя
- Контролировать направление вращения двигателя постоянного тока
Необходимые компоненты
Вам понадобятся следующие компоненты —
- 1x Arduino UNO доска
- 1x PN2222 Транзистор
- 1x малый 6В постоянного тока
- 1x 1N4001 диод
- 1x 270 Ом Резистор
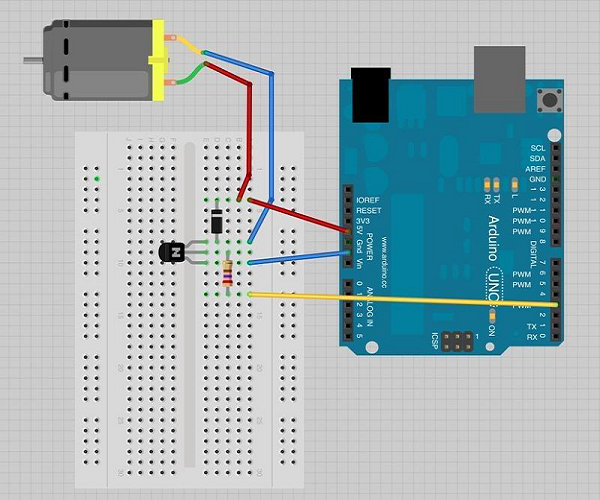
Процедура
Следуйте электрической схеме и выполните соединения, как показано на рисунке ниже.
Меры предосторожности
При подключении соблюдайте следующие меры предосторожности.
Сначала убедитесь, что транзистор подключен правильно. Плоская сторона транзистора должна быть обращена к плате Arduino, как показано на схеме.
Во-вторых, полосатый конец диода должен быть направлен к линии питания + 5 В в соответствии с расположением, показанным на рисунке.
Сначала убедитесь, что транзистор подключен правильно. Плоская сторона транзистора должна быть обращена к плате Arduino, как показано на схеме.
Во-вторых, полосатый конец диода должен быть направлен к линии питания + 5 В в соответствии с расположением, показанным на рисунке.
Spin ControlArduino Code
Код для заметки
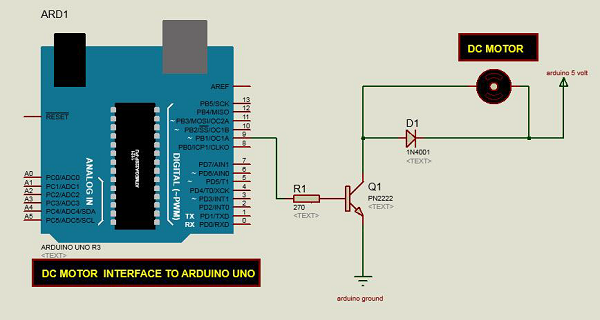
Транзистор действует как переключатель, управляющий питанием двигателя. Контакт 3 Arduino используется для включения и выключения транзистора, и на эскизе ему присваивается название «motorPin».
Результат
Двигатель будет вращаться на полной скорости, когда вывод Arduino № 3 поднимется высоко.
Видео:Драйвер двигателей L298N - Обзор, Тест, Подключение к ArduinoСкачать

Контроль скорости двигателя
Ниже приведена принципиальная схема двигателя постоянного тока, подключенного к плате Arduino.
Arduino Code
Код для заметки
Транзистор действует как переключатель, управляющий мощностью двигателя. Контакт 3 Arduino используется для включения и выключения транзистора, и на эскизе ему присваивается название «motorPin».
Когда программа запускается, она предлагает вам ввести значения для управления скоростью двигателя. Вам необходимо ввести значение от 0 до 255 в Serial Monitor.
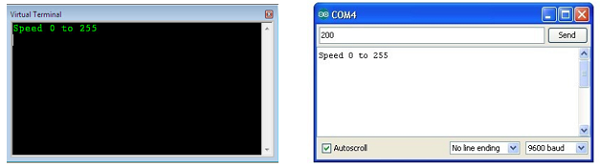
В функции «loop» команда «Serial.parseInt» используется для считывания числа, введенного в виде текста в Serial Monitor, и преобразования его в «int». Вы можете ввести любой номер здесь. Оператор ‘if’ в следующей строке просто выполняет аналоговую запись с этим номером, если число находится в диапазоне от 0 до 255.
Результат
Двигатель постоянного тока будет вращаться с различными скоростями в соответствии со значением (от 0 до 250), полученным через последовательный порт.
Видео:Arduino урок №2. Изменяем скорость DC мотора ШИМСкачать

Контроль направления вращения
Для управления направлением вращения двигателя постоянного тока без замены проводов можно использовать схему, называемую H-мостом . H-мост — это электронная схема, которая может управлять двигателем в обоих направлениях. H-мосты используются во многих различных приложениях. Одним из наиболее распространенных приложений является управление двигателями в роботах. Он называется H-мостом, потому что он использует четыре транзистора, соединенных таким образом, что принципиальная схема выглядит как «H».
Мы будем использовать L298 H-Bridge IC здесь. L298 может контролировать скорость и направление двигателей постоянного тока и шаговых двигателей, а также может управлять двумя двигателями одновременно. Его текущий рейтинг составляет 2А для каждого двигателя. Однако при таких токах вам необходимо использовать радиаторы.
Необходимые компоненты
Вам понадобятся следующие компоненты —
- 1 × L298 мостовая ИС
- 1 × двигатель постоянного тока
- 1 × Arduino UNO
- 1 × макет
- 10 × перемычек
Читайте также: Yamaha лодочные моторы 300
Процедура
Ниже приведена принципиальная схема интерфейса двигателя постоянного тока с платой Arduino Uno.
На схеме выше показано, как подключить микросхему L298 для управления двумя двигателями. Для каждого двигателя имеется три входных контакта: Вход1 (IN1), Вход2 (IN2) и Разрешить1 (EN1) для Двигателя1 и Вход3, Вход4 и Разрешить2 для Двигателя2.
Поскольку в этом примере мы будем управлять только одним двигателем, мы подключим Arduino к IN1 (контакт 5), IN2 (контакт 7) и Enable1 (контакт 6) микросхемы L298. Контакты 5 и 7 являются цифровыми, т. Е. Входы ВКЛ или ВЫКЛ, а для вывода 6 требуется сигнал с широтно-импульсной модуляцией (ШИМ) для контроля скорости двигателя.
В следующей таблице показано направление вращения двигателя на основании цифровых значений IN1 и IN2.
| В 1 | IN2 | Мотор Поведение |
|---|---|---|
| ТОРМОЗНАЯ | ||
| 1 | ВПЕРЕД | |
| 1 | BACKWARD | |
| 1 | 1 | ТОРМОЗНАЯ |
Контакт IN1 микросхемы L298 подключен к контакту 8 Arduino, а IN2 подключен к контакту 9. Эти два цифровых контакта Arduino контролируют направление двигателя. EN Контакт IC подключен к выводу 2 ШИМ Arduino. Это будет контролировать скорость двигателя.
Чтобы установить значения выводов Arduino 8 и 9, мы использовали функцию digitalWrite (), а для установки значения вывода 2 мы должны использовать функцию analogWrite ().
Шаги подключения
- Подключите 5V и заземление IC к 5V и заземлению Arduino соответственно.
- Подключите двигатель к контактам 2 и 3 микросхемы.
- Подключите IN1 IC к контакту 8 Arduino.
- Подключите IN2 IC к контакту 9 Arduino.
- Подключите EN1 IC к контакту 2 Arduino.
- Подключите SENS A контакт IC к земле.
- Подключите Arduino с помощью USB-кабеля Arduino и загрузите программу в Arduino с помощью программного обеспечения Arduino IDE.
- Подайте питание на плату Arduino с помощью блока питания, аккумулятора или USB-кабеля.
Arduino Code
Результат
Двигатель будет сначала вращаться в направлении по часовой стрелке (CW) в течение 3 секунд, а затем в течение 3 секунд против часовой стрелки (CCW).
Видео:Управление двигателем постоянного тока, линейным приводом. АрдуиноСкачать

Управление двигателем постоянного тока с помощью Arduino и ИМС L298
Подключив к Arduino микросхему моста L298, вы сможете управлять двигателем постоянного тока.
Двигатель постоянного тока (DC) является наиболее распространенным типом электродвигателей. Двигатели постоянного тока обычно имеют только два вывода, один положительный и один отрицательный. Если вы подключите эти два вывода напрямую к аккумулятору, двигатель начнет крутиться. Если же поменять полярность подаваемого напряжения, двигатель будет вращаться в противоположном направлении.
Чтобы управлять направлением вращения двигателя постоянного тока без переподключения питания к его выводам, вы можете использовать схему, называемую Н-мостом. Н-мост – это электронная схема, которая может управлять вращением двигателя в обоих направлениях. Н-мосты используются во множестве различных приложений, самым распространенным из которых является управление двигателями в роботах. Эта схема называется Н-мостом потому, что она использует четыре транзистора, подключенных таким образом, что схема выглядит как буква «Н».
Для сборки данной схемы вы можете использовать дискретные транзисторы, но в этом руководстве мы будем использовать микросхему Н-моста L298. L298 может управлять скоростью и направлением вращения двигателей постоянного тока и шаговых двигателей и может управлять двумя двигателями одновременно. Допустимый ток для каждого из двигателей составляет 2 ампера. Однако при таких токах вам будет необходимо использовать радиаторы.
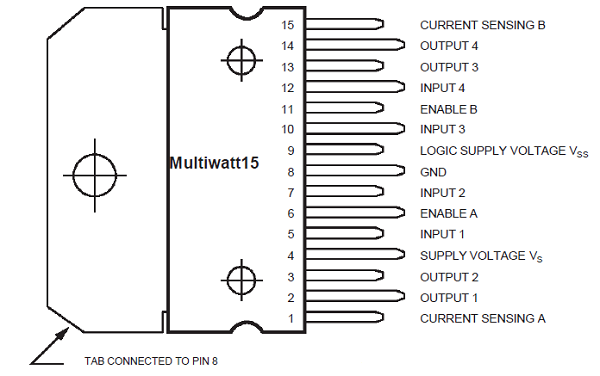
Распиновка микросхемы L298 показана на рисунке ниже. Техническое описание L298 можно скачать здесь.
Видео:Как настроить ШАГОВЫЙ ДВИГАТЕЛЬ 28BYJ-48 Arduino?! ОбзорСкачать

Распиновка микросхемы L298 (вид сверху)
Видео:Запускаем бесколлекторный мотор из жесткого диска с помощью ардуино своими руками DIY без драйвера!Скачать

Необходимые комплектующие
- 1 x микросхема моста L298
- 1 x двигатель постоянного тока
- 1 x Arduino Mega 2560
- 1 x макетная плата
- 10 x перемычка
 Комплектующие для эксперимента управления двигателем постоянного тока с помощью Arduino
Комплектующие для эксперимента управления двигателем постоянного тока с помощью Arduino 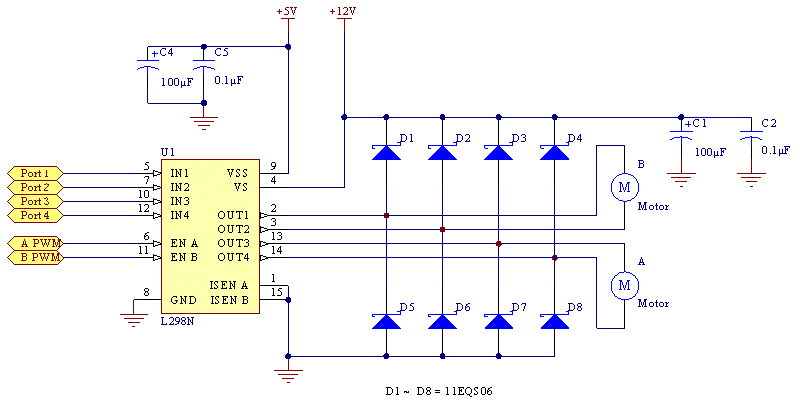 Схема включения микросхемы L298 для управления двумя электродвигателями
Схема включения микросхемы L298 для управления двумя электродвигателями
Схема выше показывает, как подключить микросхему L298 для управления двумя электродвигателями. Для управления каждым двигателем у микросхемы есть по три вывода: вход 1 (IN1), вход 2 (IN2) и включение A (EN A) для двигателя 1, и вход 3 (IN3), вход 4 (IN4) и включение B (EN B) для двигателя 2.
Поскольку в данном руководстве мы будем управлять только одним электродвигателем, то мы подключим Arduino к выводам IN1 (вывод 5), IN2 (вывод 7) и EN A (вывод 6) микросхемы L298. Выводы 5 и 7 цифровые, то есть для вращения двигателя в заданную сторону на эти выводы необходимо подавать неизменяющиеся в времени сигналы логического нуля или единицы. В то время, как на вывод 6 необходимо подавать широтно-импульсно-модулированный (ШИМ) сигнал, который управляет скоростью вращения двигателя.
Следующая таблица показывает, в каком направлении будет вращаться электродвигатель в зависимости от логических уровней на входах IN1 и IN2.
В таблице ниже приведено описание подключения микросхемы L298 к нашей плате Arduino Mega 2560.
Для установки значений на выводах 8 и 9 платы Arduino мы будем использовать функцию digitalWrite() , а для установки занчений на выводе 2 – функцию analogWrite() .
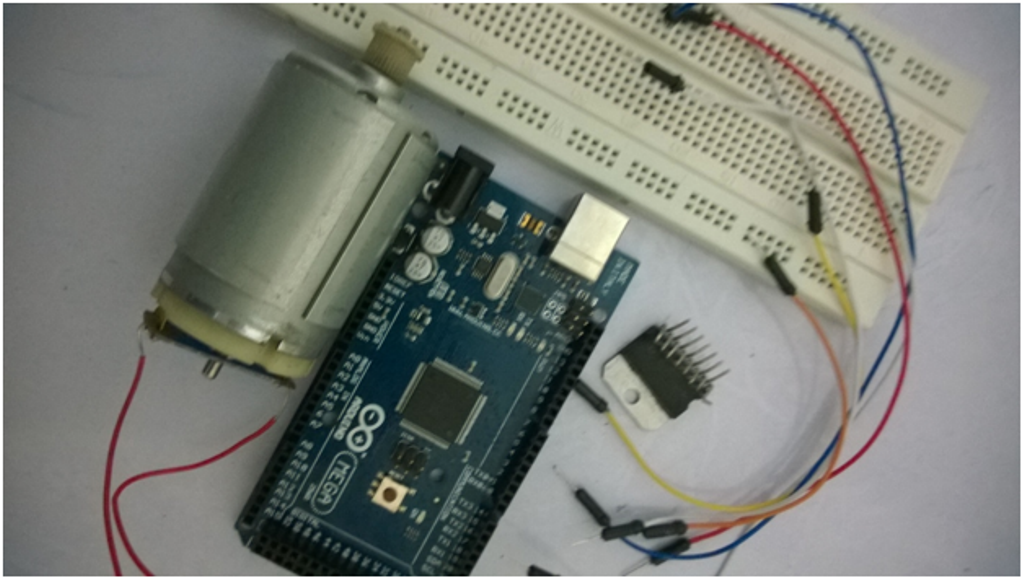
Ниже показана фотография стенда, собранного для проведения эксперимента.
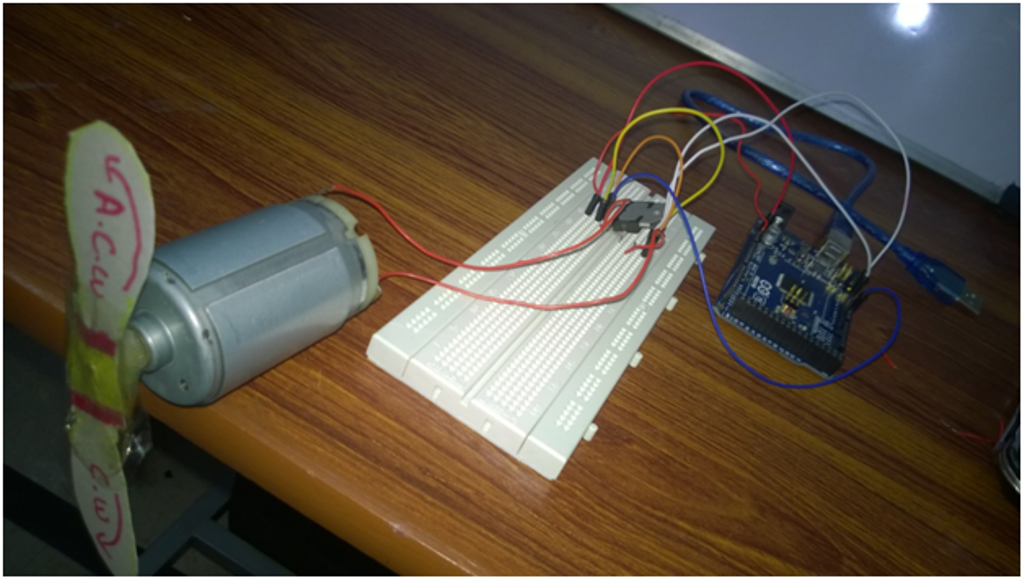
Стенд для проведения эксперимента по управлению двигателем постоянного тока с помощью Arduino и микросхемы Н-моста L298
Видео:Модуль драйвера двигателей L298N и ArduinoСкачать

Сборка
- Подключите выводы 5V и корпус микросхемы L298 к выводам 5V и корпус платы Arduino;
- Подключите двигатель к выводам 2 и 3 микросхемы L298;
- Подключите вывод IN1 микросхемы L298 к выводу 8 платы Arduino;
- Подключите вывод IN2 микросхемы L298 к выводу 9 платы Arduino;
- Подключите вывод EN A микросхемы L298 к выводу 2 платы Arduino;
- Подключите вывод SENS A микросхемы L298 к корпусу;
- Подключите Arduino к компьютеру, используя USB кабель, и загрузите программу на плату, используя Arduino IDE;
- Обеспечьте питание платы Arduino с помощью источника питания, аккумулятора или USB кабеля.
Теперь двигатель должен сначала вращаться по часовой стрелке в течение 3 секунд, а затем против часовой стрелки так же в течение 3 секунд.
Видео:Переделываем DC-DC преобразователь для управления с ArduinoСкачать

Видео
🌟 Видео
Уроки Ардуино #9 - управление нагрузкой MOSFET транзисторСкачать

NEMA17 Управление шаговым двигателем - Stepper motor with ArduinoСкачать

ЭЛЕКТРОНИКА - Обзор драйвера моторов MX1508 для ArduinoСкачать

Управление мотором ардуиноСкачать

Панель управления шаговым двигателем на Arduino.Скачать

Драйвер двигателей l293d управление dc мотором на arduinoСкачать
Управление шаговым двигателем. Драйвер A4988, подключение и настройкаСкачать

Обзор драйверов для двигателей постоянного тока 3-36В 10А еще 24В 7А а так же l293d l298nСкачать
