


В пользовании у мастера есть два компрессора расположенные в разных местах. Для контроля ежедневно ему приходилось измерять вибрацию и температуру компрессоров. Естественно это отнимает время. Для решения проблемы мастер решил сделать удаленный контроль за их состоянием. В принципе, вместо компрессора может быть любое другое устройство.
Так же в статье мы познакомимся с приложением Blynk, узнаем какой модуль ESP выбрать, для чего нужна плата MPU6050 и многое другое.


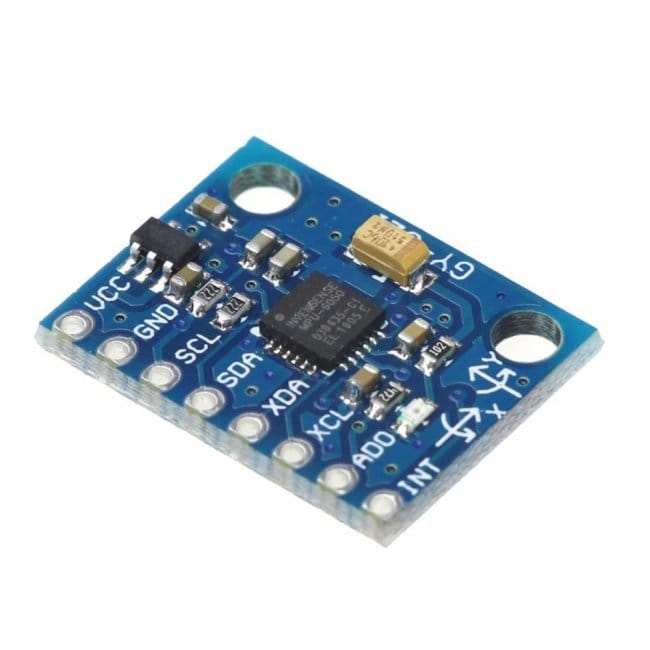
Шаг первый: модуль GY-521 MPU6050
Плата MPU-6050 объединяет 3 оси гироскопа и 3 оси акселерометра и может быть применена для контроля работы за компрессором.
Принцип работы модуля:
Гироскоп
Гироскопические датчики могут контролировать ориентацию, направление, угловое перемещение и вращение. На смартфоне гироскопический сенсор обычно выполняет функции распознавания жестов. Кроме того, гироскопы смартфонов помогают определить положение и ориентацию устройства.
Акселерометр
Акселерометр — это датчик, который измеряет ускорение, а также наклон, угол наклона, вращение, вибрацию, столкновение и силу тяжести. При использовании на смартфоне акселерометр может автоматически изменять отображение телефона по вертикали или горизонтали, поскольку этот датчик может проверять, на какую ось действует вектор ускорения свободного падения.
Этот датчик использует протокол связи I2C.
I2C может работать в двух режимах, Master и Slave.
Распиновка:
VCC — положительный контакт питания;
GND — земля;
SDA — линия данных I2C;
SCL — линия синхроимпульсов I2C;
INT — настраиваемое прерывание;
AD0 — I2C адрес; по-умолчанию AD0 подтянут к земле, поэтому адрес устройства — 0x68; если соединить AD0 к контакту питания, то адрес изменится на 0x69;
XCL, XDA — дополнительный I2C интерфейс для подключения внешнего магнитометра
Видео:Уроки Arduino. Управление моторами с библиотекой GyverMotorСкачать


Появление новых устройств, которые также можно программировать в Arduino, а также использование плат расширения (плат, которые добавляют функции к устройствам Arduino) добавили возможности проектов, которые можно разрабатывать на Arduino.
В то же время появление сервисов, подключенных к Интернету, и концепция IoT (Интернет вещей) увеличили спрос на устройства, которые имеют возможность подключения и, таким образом, обеспечивают удаленное управление этими устройствами через Интернет.
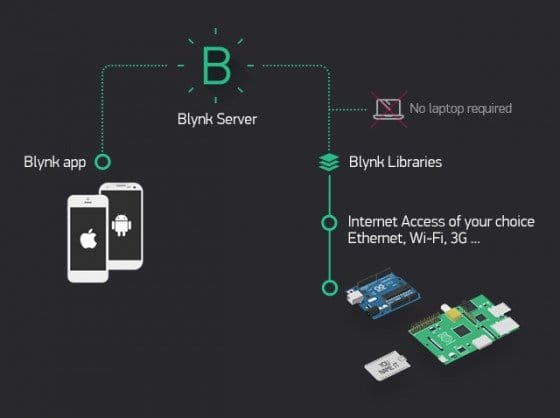
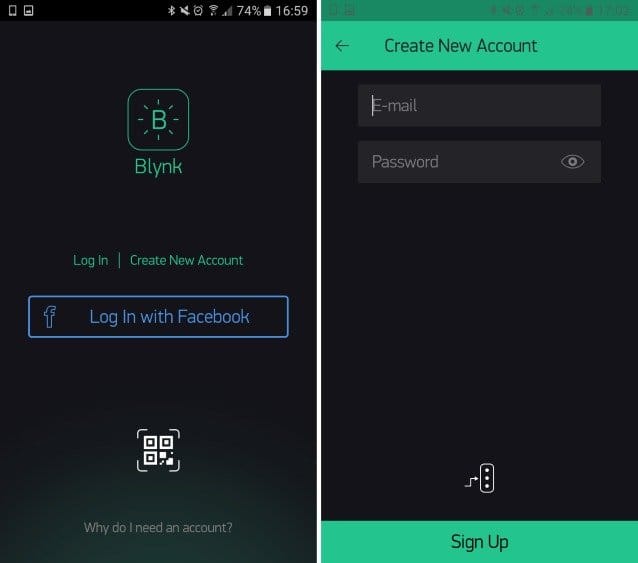
BLYNK — это именно один из таких сервисов.
Эта программа позволяет удаленно управлять программируемым оборудованием, а также передавать данные об оборудовании в приложение.
Таким образом, можно быстро и интуитивно создавать графические интерфейсы управления, которые взаимодействуют с более чем 400 платами, в основном на основе Arduino.
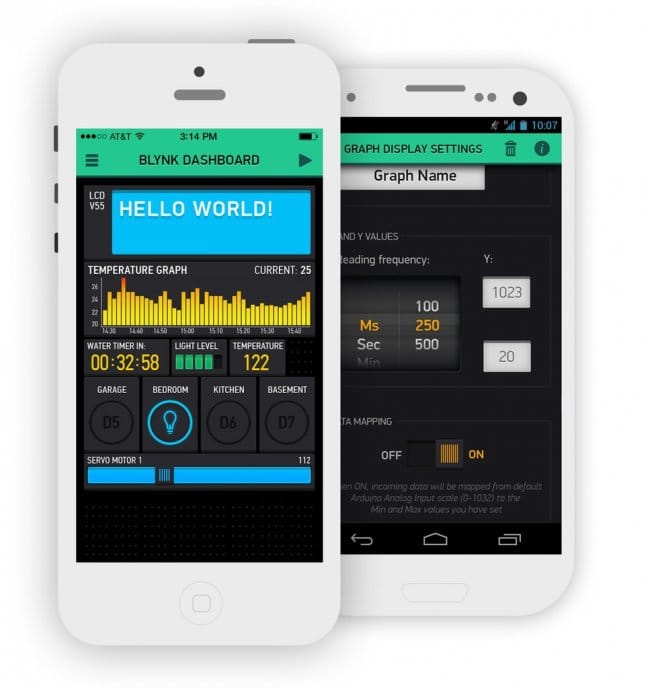
Приложение Blynk — это программа, доступная для Android и iOS, которое позволяет пользователю создавать приложения, взаимодействующие с оборудованием. Для каждого проекта пользователь может вставлять виджеты, которые реализуют функции управления (такие как кнопки, ползунки и клавиши), уведомления и чтение данных оборудования (отображение на дисплеях, графиках и картах).
Читайте также: Сколько стоит ремонт компрессоров
Все взаимодействие между приложением и оборудованием пользователя происходит через облако Blynk. Сервер отвечает за передачу данных на оборудование, сохранение состояний приложений и оборудования, а также за хранение данных датчиков, считанных оборудованием, даже если приложение закрыто.
К данным, хранящимся на сервере Blynk, можно получить доступ извне через HTTP API, что открывает возможность использования Blynk для хранения периодически генерируемых данных, например, данных датчика температуры.
Что касается аппаратного обеспечения, у нас есть библиотеки Blynk для нескольких платформ разработки. Эта библиотека отвечает за управление всем аппаратным подключением к серверу Blynk и управление запросами ввода и вывода для данных и команд.
Приложение Blynk доступно для бесплатной загрузки. Доступ к серверу Blynk не ограничен (и по-прежнему позволяет реализовать его локально через предоставленный открытый исходный код), Библиотеки Blynk также бесплатны.
Однако каждый виджет «стоит» определенное количество энергии — своего рода виртуальную валюту. При регистрации каждому пользователю выдается 2000 единиц энергии. Если нужно больше энергии, то ее можно приобрести дополнительно.
Если «разобрать» проект, то энергия возвращается обратно в рюкзак пользователя.
Видео:Управление моторами с ArduinoСкачать


Шаг четвертый: создание нового проекта
После регистрации появится главный экран приложения. Дальше нужно выбрать опцию New Project (новый проект), и откроется новая страница.
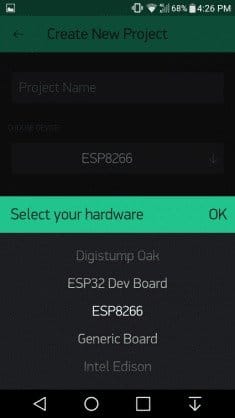
Дальше в графе Project Name введите имя проекта. Выберите тип устройства, которое вы будете использовать, на вкладке Choose Device.
В данном проекте использовалось название Project IOT с выбранной опцией ESP8266.
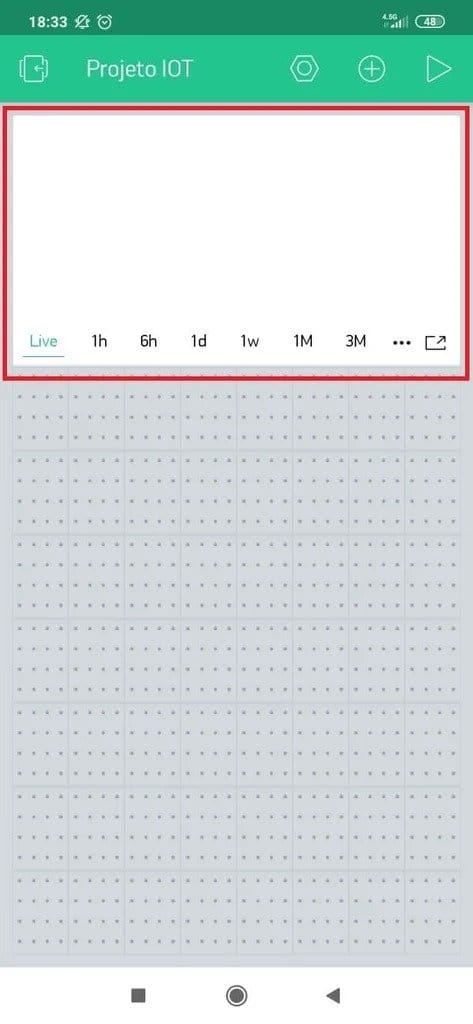
После нажатия кнопки «Create» у пользователя будет доступ к холсту проекта, то есть к пространству, в котором можно создавать собственное приложение.
Одновременно на адрес электронной почты, зарегистрированный в приложении, будет отправлено письмо с кодом.

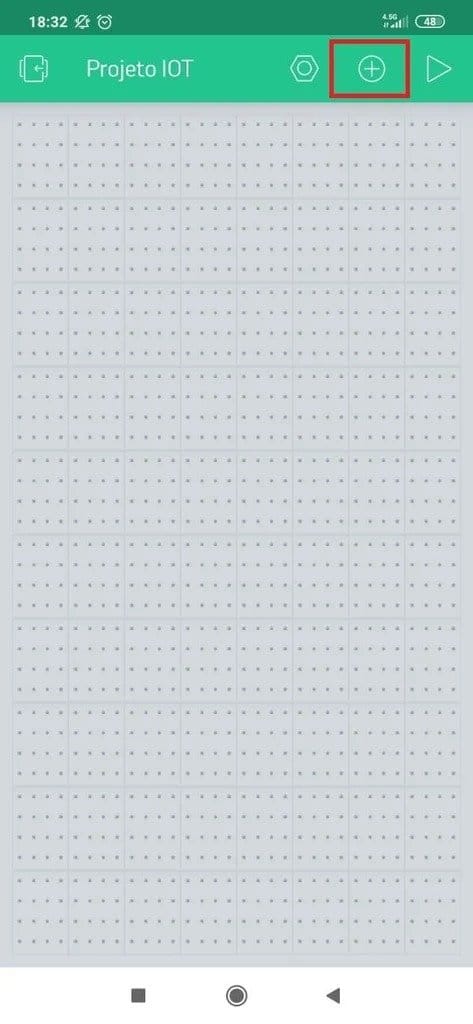
Шаг пятый: настройка проекта и виджета
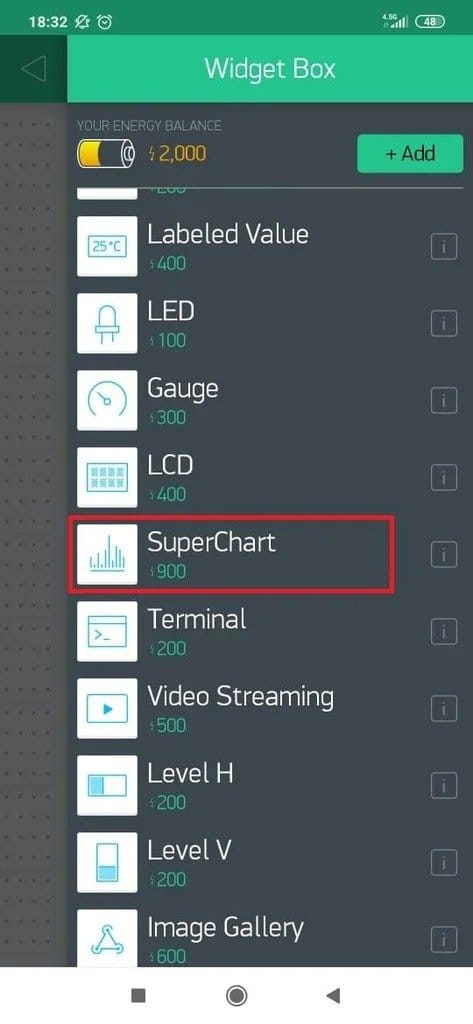
На странице проекта нужно кликнуть в любом месте экрана и откроется список доступных виджетов.
Есть 5 типов виджетов:
Контроллеры — используются для отправки команд, управляющих оборудованием.
Дисплеи — используются для просмотра данных с датчиков и других источников;
Уведомления — отправка сообщений и уведомлений;
Интерфейс — виджеты для выполнения определенных функций графического интерфейса;
Другое — виджеты, не относящиеся ни к одной категории;
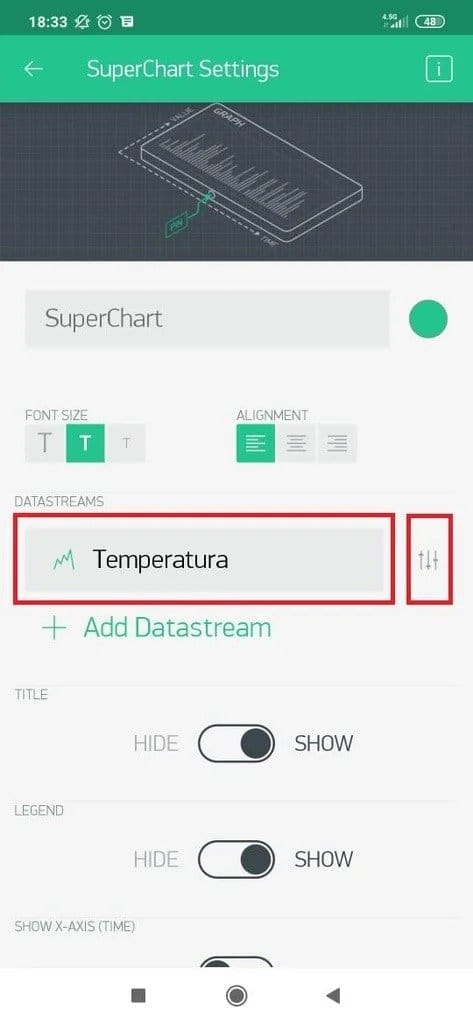
У каждого виджета свои настройки.
В данном проекте был выбран виджет SuperChart. Виджет SuperChart «стоит» 900 единиц энергии, которые будут вычтены из начальной суммы (2000), показанной в верхней части экрана. Затем этот виджет будет добавлен в макет проекта. Так как компрессора два, то и виджета нужно два.
Читайте также: Лучший фен компрессор для собак
Видео:Уроки Arduino - управление бесколлекторным моторомСкачать

.
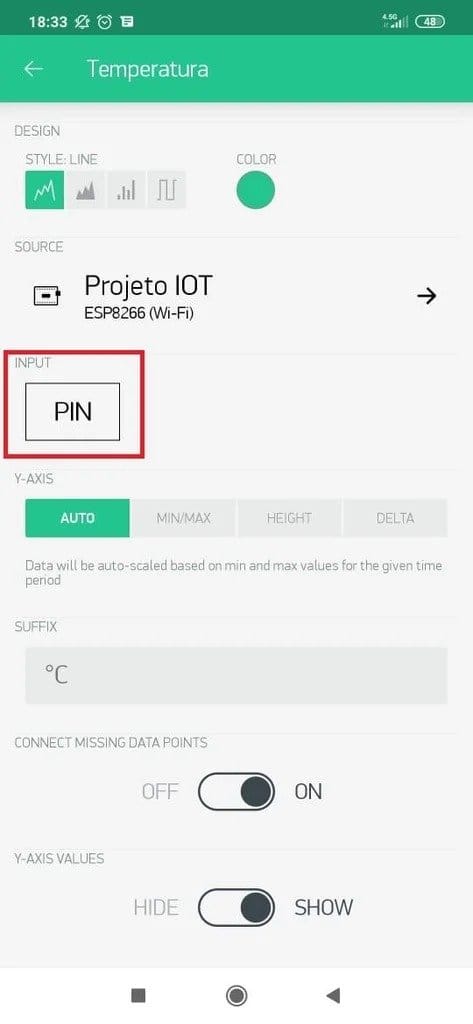
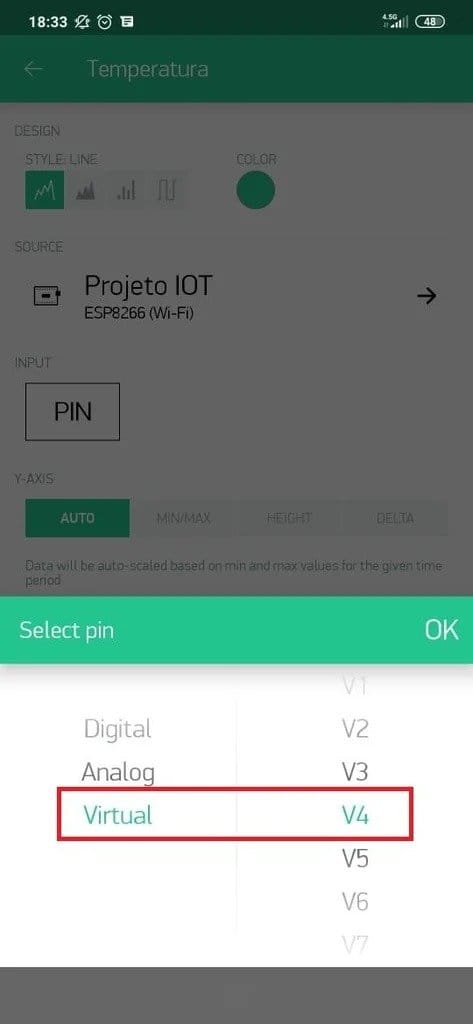
Аналоговые выводы — представляют собой физические аналоговые выводы ввода-вывода на вашем оборудовании.
Виртуальные пины — используются для передачи любых данных между приложением Blynk и вашим оборудованием.
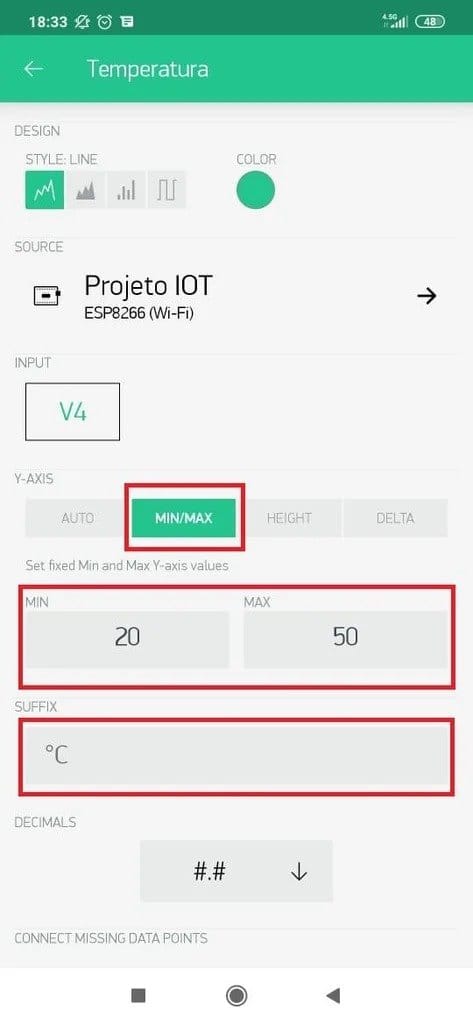
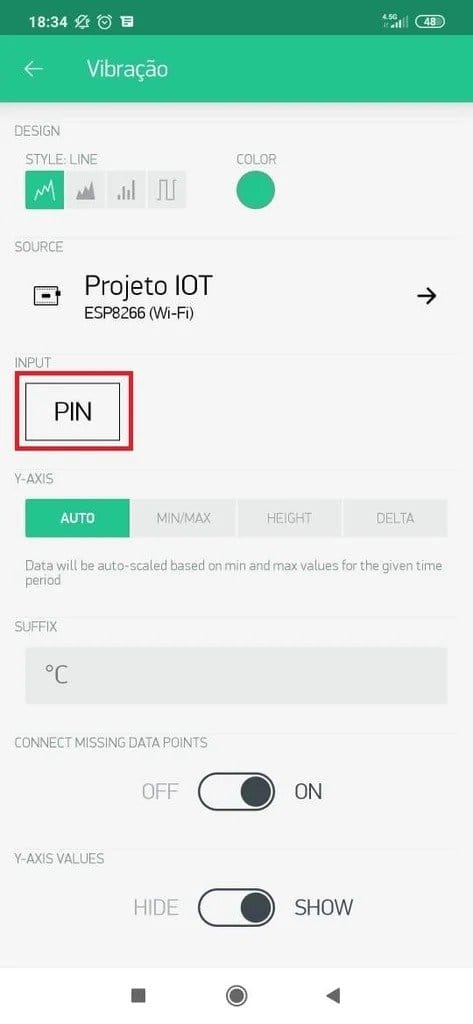
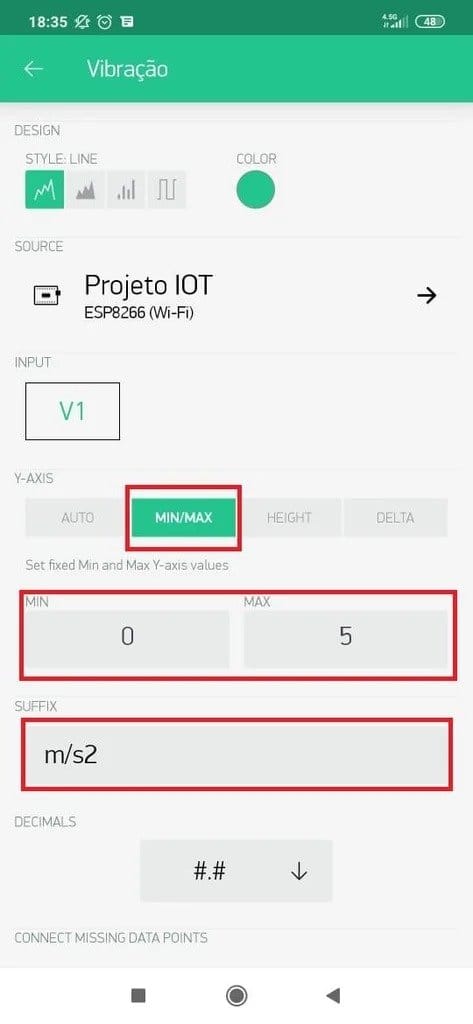
В данном проекте используются VIRTUAL V4 для температуры и VIRTUAL V1 для вибрации.
После выполнения команды приложение попытается подключиться к оборудованию через сервер Blynk. Однако у нас все еще нет оборудования, настроенного для его использования.


Шаг шестой: установка библиотеки и код
Теперь нужно установим библиотеку Blynk для Arduino IDE.
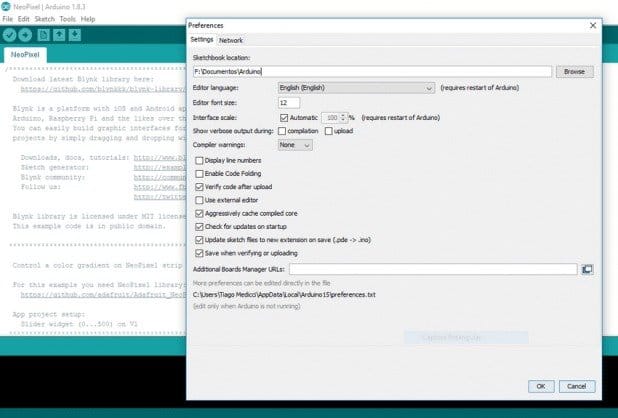
Загружаем файл Blynk_Release_vXX.zip. Затем разархивируем содержимое файла в папке альбомов Arduino IDE. Местоположение этой папки можно узнать непосредственно из среды разработки Arduino. Для этого откройте IDE Arduino и в File → Preferences посмотрите месторасположения Sketchbook.
После этого содержимое распакованного файла должно выглядеть следующим образом:
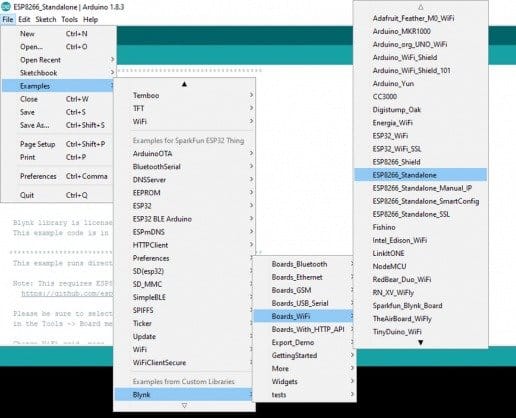
После перезапуска IDE Arduino новые образцы кода, относящиеся к библиотеке Blynk, можно найти в разделе File → Examples → Blynk. Для данного примера аппаратного обеспечения, ESP8266, мастер выбирает пример File → Examples → Blynk → Boards_WiFi → ESP8266_Standalone.


Шаг седьмой: модуль ESP
ESP6050 — это микросхема, которая произвела революцию благодаря своей низкой стоимости и быстрому распространению.
Что привлекает наибольшее внимание, так это наличие Wi-Fi, позволяющего подключать к Интернету (или локальной сети) несколько устройств, таких как датчики, исполнительные механизмы и т. д.
Чтобы облегчить использование этого чипа, несколько производителей создали модули и отладочные платы.
Эти модули различаются по размеру, количеству контактов или типу подключения.

В модулях используется один и тот же контроллер ESP8266, а количество портов GPIO зависит от модели модуля. В зависимости от модели могут быть интерфейсы I2C, SPI и PWM (помимо последовательного).
Модули питаются от 3,3В. У них также есть 32-битный процессор, работающий на частоте 80 МГц, поддерживающий Интернет в стандартах 802.11 b / g / n и различные протоколы безопасности, такие как WEP, WPA, WPA2 и т. д.
Видео:Умная теплица на Arduino с управлением/мониторингом по GSM/GPRSСкачать

Программирование может выполняться с помощью AT-команд или на языке LUA. Они идеально подходят для проектов Интернета вещей, поскольку в спящем режиме они потребляют очень мало энергии.

Теперь об различиях модулей.
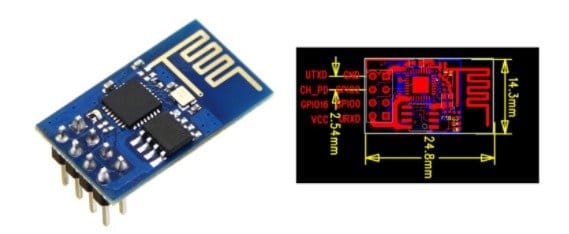
Модуль ESP8266 ESP-01 .
Модуль ESP8266 ESP-01 — самый распространенный модуль в линейке ESP8266.
Он компактен (24,8 x 14,3 мм) и имеет два контакта GPIO, которыми можно управлять по расписанию. Прошивка ESP-01 может быть переписана и / или обновлена с помощью последовательного интерфейса.
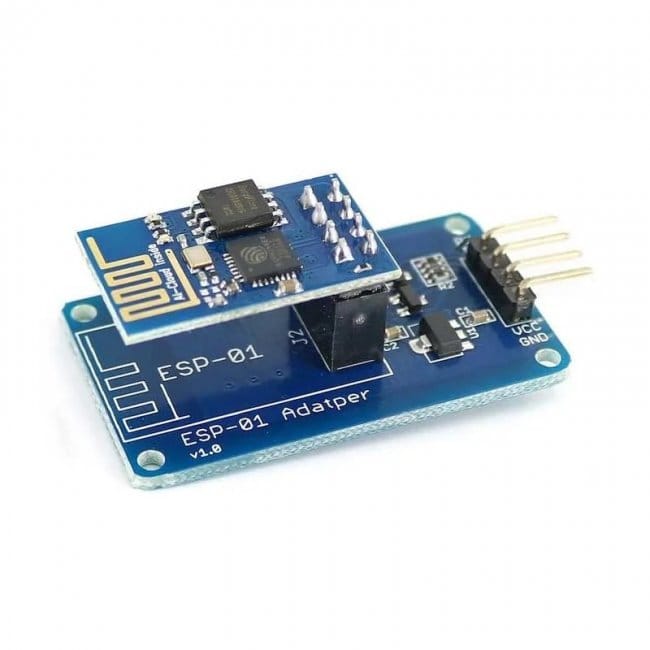
Небольшим недостатком этого типа модуля является расположение контактов, которое затрудняет использование в прототипной плате, но можно использовать адаптер для модуля Wi-Fi ESP8266 ESP-01 (на фото ниже).
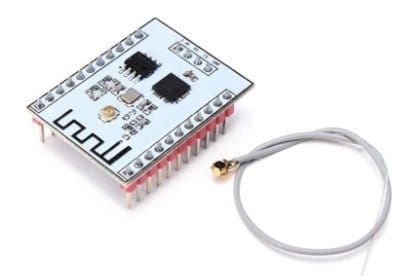
Модуль ESP8266 ESP-05 .
Модуль Wi-Fi ESP8266 ESP-05 немного отличается от других плат линейки ESP8266, так как у него нет портов, которые можно использовать для активации устройств или чтения данных с датчиков.
Читайте также: Замена компрессора кондиционера мерседес w164
С другой стороны, это интересная альтернатива для проектов Интернета вещей, когда нужно хорошее сетевое Интернет-соединение по невысокой цене.
Его можно использовать, например, для настройки веб-сервера с Arduino или для связи на большом расстоянии между платами.
У него нет встроенной антенны, но у него есть разъем для внешней антенны что значительно увеличивает диапазон сигнала Wi-Fi.

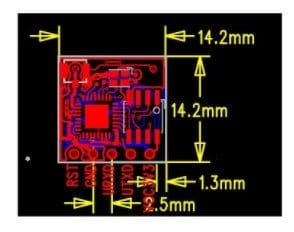


Модуль ESP8266 ESP-07 .
Модуль ESP8266 ESP-07 также представляет собой компактный модуль (20 x 16 мм), но с другой компоновкой, без соединительных контактов.
Модуль имеет встроенную керамическую антенну, а также U-Fl разъем для подключения внешней антенны. Этот модуль имеет 9 GPIOS, которые могут работать как выводы I2C, SPI и PWM.
Компоновка модуля позволяет легко интегрировать его в печатную плату, широко используемую в проектах домашней автоматизации.
Видео:САМОДЕЛЬНАЯ ДАЛЬНОБОЙНАЯ ARDUINO аппаратура управления || ExpressLRSСкачать


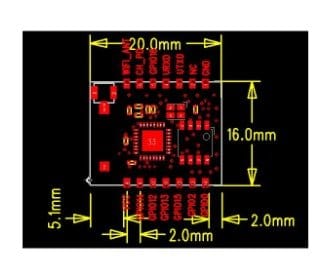

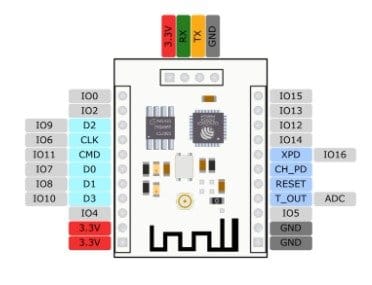
Модуль ESP8266 ESP-201 .
Модуль ESP8266 ESP-201 — это немного более простой в использовании модуль с точки зрения прототипирования, так как он может быть установлен на макетной плате.
4 боковых контакта, которые отвечают за последовательную связь, немного мешают этому типу сборки, но можно припаять эти контакты на противоположной стороне платы или использовать какой-либо адаптер.
ESP-201 имеет 11 портов GPIO, встроенную антенну и разъем U-FL для внешней антенны. Выбор антенны осуществляется путем смены перемычки (резистор 0 (ноль) Ом) в верхней части платы, рядом с разъемом U-FL.
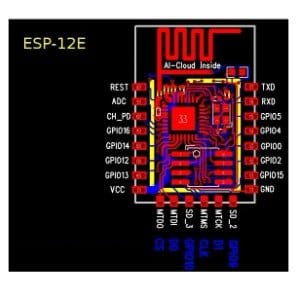
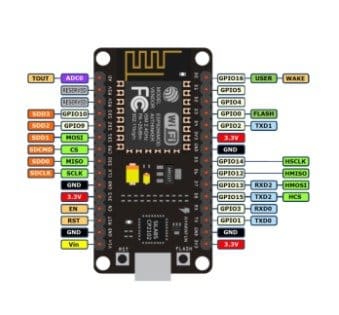
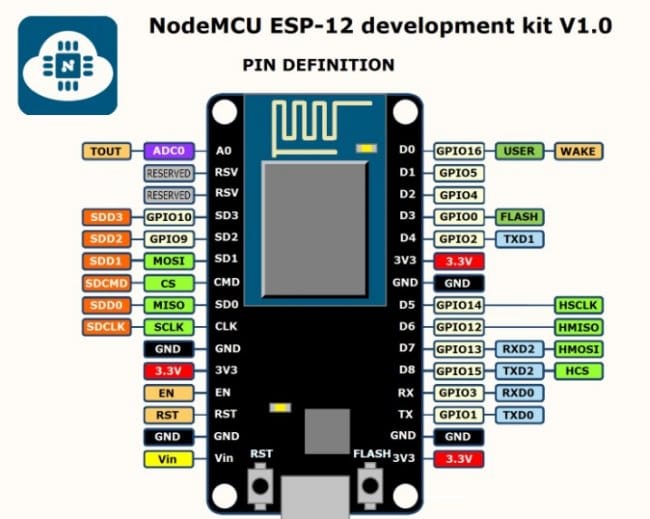
Модуль ESP8266 ESP-12E .
Модуль ESP8266 NodeMCU ESP-12E представляет собой законченную плату для разработки, которая в дополнение к микросхеме ESP8266 имеет преобразователь TTL-Serial и регулятор напряжения 3,3 В.
Это модуль, который может быть напрямую подключен к макетной плате и не требует использования внешнего микроконтроллера для работы, так как его можно легко программировать с помощью LUA.
Он имеет 10 контактов GPIO (I2C, SPI, PWM), разъем micro-usb для программирования / питания и кнопки для сброса и прошивки модуля.
Как мы видим на изображении, NodeMCU ESP-12E поставляется со встроенной антенной, припаянной к плате.

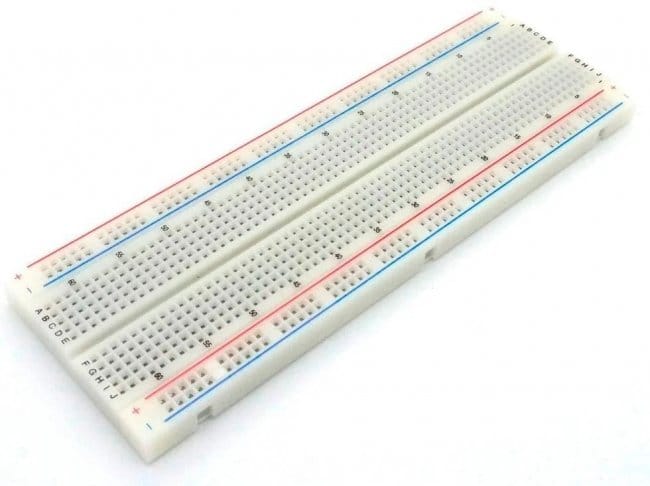
Шаг восьмой: монтаж
Сборку мастер производит на макетной плате.
Макетная плата — это пластина с отверстиями и токопроводящими дорожками, используемая для сборки прототипов и проектов. Размер платы варьируются от 800 до 6000 отверстий, с вертикальными и горизонтальными соединениями.
Видео:Запускаем бесколлекторный мотор из жесткого диска с помощью ардуино своими руками DIY без драйвера!Скачать

На поверхности контактной матрицы имеется пластиковая основа, в которой есть отверстия для установки компонентов. В ее нижней части установлены металлические контакты. Обычно они выдерживают токи от 1 до 3 А.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
🎬 Видео
Уроки Arduino - управление сервомашинкойСкачать

Уроки Ардуино #9 - управление нагрузкой MOSFET транзисторСкачать
ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]Скачать
🦾Оживляем танк с манипулятором на ArduinoСкачать
Обманка для замены инверторного компрессора на обычный на Arduino nano.Скачать
ДИСТАНЦИОННАЯ АППАРАТУРА УПРАВЛЕНИЯ НА АРДУИНОСкачать
Подключение джойстика к Arduino Управление сервоприводами.Скачать
Управление Сервоприводом через ИК оптопаруСкачать
Управление нагрузкой Arduino, что для чегоСкачать
SG90 сервопривод Управление кнопками Подключение сервомотораСкачать
Управление погружным насосом на ArduinoСкачать
Уроки Ардуино. Управление нагрузкой в сети переменного токаСкачать
💧Система автоматического полива растений своими рукамиСкачать
🚗Bluetooth танк - powerbank своими рукамиСкачать


![ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]](https://i.ytimg.com/vi/jJQwmnyfw5k/0.jpg)










