
Получив сегодня утром быстрые и оч.полезные советы относительно выбора типов ультразвуковых и лазерных датчиков, воодушевился и решил еще один живо трепещущий вопрос задать.
А именно — управлениие и опробованное железо для управления мотор колесами от гироскутеров с помощью ардуино.
Мотор колеса от скутеров сейчас активно использоваться начали не только для именно самокатов или тележек на их базе, но и компактные мощные приводы для других устройств (в первую очередь всяких переносных) и для работы в тяжелых и вспеогодных условиях.
Цена колес невысока, разные диаметры и типы покрышек, ломаться почти нечему, их можно приобрести как по отдельностти так и раздербанив б\у гироскутер (заодно получив и батарею).
Короче, штука переспективная.
Управлять прямо гироскопом по датчикам Холла, собюдая баланс — таких проектов у меня в проекте пока нет. А вот просто навострится управлять этим колесом вперед-назад а также разгон и т.д. — это было бы нужно очень.
А главное — какие мосты и драйверы стоит для этого использовать.
Нашлось достаточно много инфы (да и продавцы гироскутерных запчатей подтверждают, что роботостроители потянулись за покупками). Но она достатчно «сырая» на мой взгляд. И весьма недавняя ( а хотелось бы еще и статистику уже понимать по применению в реальных условиях и проектах). И от этого не совсем ясно однозначное направление, что и как лучше использовать:
сразу здесь эта тема мне не попалась (хотя не может быть, чтобы не обсуждалась уже).
Если уже идет гдето обсуждение — плиз, ткните носом.
P\S Интересует именно управление гироскутерными колесами (хотя по идее наверно и вело и тому подобные — похожи). Посткольку важна не столько скорость, сколько сочетание вес\компактность\мощностьи ( на будущее) возможность точного позиционирования.

Так мы уже год как управляем вот таким колесом при помощи вот такой платы.
Могу цвета проводов рассказать. Или чего Вам собственно нужно-то?
Так мы уже год как управляем вот таким колесом при помощи вот такой платы.
Могу цвета проводов рассказать. Или чего Вам собственно нужно-то?
отлично! такое примерно колесо я и предполагаю использовать. 10 дюймовые с камерной покрышкой. Еще вроде по такойже цене и 14 дюймовые сегвейные нашол, но 14 слишком здоровенные.
по плате — огромное спасибо за инфу! вот уже нашол тут про нее (но мало)
а также видимо ее вживую я в стране врядли найду. Придется заказывать?
А нужно мне — вот то что вы и написали))) Большое спаисбо. А именно — какую плату взять для управления чтобы не городить огорода и понять, в какую строну копать)))
Кстати, если управляете уже достаточно давно — наверняка и опыт есть и какието косяки пойманы. Я бы с удовольствием воспользовался инфой и опытом НА ВОЗМЕЗДНОЙ основе в благоразумных пределах))) Сэкономленное время — сэкономленные деньги)))
Мне щас надо просто управлять этим колесом (точнее — двумя) в режиме вперед\назад , разгон\замедление\остановка ( до 5 -6 км\ч, не более). Это такая тележка с ящиком для перевозки взад вперед (без поворотов, по прямой) деталей. Режимы разгона и замедления и отсутсвие резких остановок и рывков — чтобы чегонить не упало с нее от рывка.
Ну, во-первых, если Вы ещё не купили колесо (или купили), Вы должны понимать есть ли у него датчики Холла. Та, плата, что у меня — для колеса с датчиками. Если колесо без датчиков, то плата вот такая.
На плате контакты подписаны буквами. А у колеса провода «подписаны» цветом. У моего колеса и моей платы соответсвие такое:
А — зелёный
B — жёлтый
C — синий
Из особенносте. Вперёд -назад управляется как описано, а вот со скоростью . в принципе тоже как описано, но имейте в виду, вход у платы управления низкоомный и жрёт заметный ток. Я подключал так:
Ну, пин не обязательно D3 — любой с ШИМом. Напряжение питания усилителя — любое от 7В до 20В. У меня реально — 9В. OUTPUT — к соответсвующему входу платы-контроллера колеса.
Так вот, при таком подключении усилитель сгорел! У него выходной ток не более 10мА, а там при резком разгоне оказалось больше! Выручил резистор 1К в цепи OUTPUT (между выходом усилителя и входом платы контроллера).
Других граблей вроде не было, работает нормально.
Для меня было проблемой запитать колесо, чтобы напряжение было стабильным и току хватало. Родной аккумулятор гироскутерв не понравился. Емкось у моего была 14Ah, напряжение — 36В (как раз напряжение колеса). Но при небольшом разряде, напряжение проседало, что нормально, а мне это не нравилось. Хотелось стабильного напряжения.
Выручили лодочные аккуьуляторы на 12В / 90Ah (можно автомобильные, но они стартовые, а лодочные — тяговые — это лучше). Соединил два штуки последовательно и поднял напряжение до 36 вольт вот такой DC-DC. Пара аккумуляторов одна, а DC-DC своя на каждый двигатель. В итоге на двигателе всегда стабильные 36В до тех пор, пока аккумуляторы не сядут до 12 (на двоих). Тогда вырубается повышалка (там можно настраивать напряжение вырубания) Повышалка легко даёт 10А, так что всё работает на ура.
Ну, во-первых, если Вы ещё не купили колесо (или купили), Вы должны понимать есть ли у него датчики Холла. Та, плата, что у меня — для колеса с датчиками. Если колесо без датчиков, то плата вот такая.
Читайте также: Мотор для алюминиевой лодки 320
На плате контакты подписаны буквами. А у колеса провода «подписаны» цветом. У моего колеса и моей платы соответсвие такое:
А — зелёный
B — жёлтый
C — синий
Из особенносте. Вперёд -назад управляется как описано, а вот со скоростью . в принципе тоже как описано, но имейте в виду, вход у платы управления низкоомный и жрёт заметный ток. Я подключал так:
Ну, пин не обязательно D3 — любой с ШИМом. Напряжение питания усилителя — любое от 7В до 20В. У меня реально — 9В. OUTPUT — к соответсвующему входу платы-контроллера колеса.
Так вот, при таком подключении усилитель сгорел! У него выходной ток не более 10мА, а там при резком разгоне оказалось больше! Выручил резистор 1К в цепи OUTPUT (между выходом усилителя и входом платы контроллера).
Других граблей вроде не было, работает нормально.
Для меня было проблемой запитать колесо, чтобы напряжение было стабильным и току хватало. Родной аккумулятор гироскутерв не понравился. Емкось у моего была 14Ah, напряжение — 36В (как раз напряжение колеса). Но при небольшом разряде, напряжение проседало, что нормально, а мне это не нравилось. Хотелось стабильного напряжения.
Выручили лодочные аккуьуляторы на 12В / 90Ah (можно автомобильные, но они стартовые, а лодочные — тяговые — это лучше). Соединил два штуки последовательно и поднял напряжение до 36 вольт вот такой DC-DC. Пара аккумуляторов одна, а DC-DC своя на каждый двигатель. В итоге на двигателе всегда стабильные 36В до тех пор, пока аккумуляторы не сядут до 12 (на двоих). Тогда вырубается повышалка (там можно настраивать напряжение вырубания) Повышалка легко даёт 10А, так что всё работает на ура.
ну, ответ начну с благодарности. Инфа ценнейшая!
Колеса еще не покупались — ясность есть толлько по диаметру (10), а вот по покрышке даже по пневмо-непневмо уже есть варианты. Т.к. этот робот человека не возит. Сама тележка 4-х колесная. 2 других колеса — просто обычные недорогие от садовой тачки или дет.коляски.
По источнику приобретения — тоже рассматриваю варианты. Толи брать готовый скутер, раздербанивать а лишние детали отдавать всяким ремонтникам, либо брать колеса как запчасти. Но их ценник не особо мал (я находил варианты по 2500, а ваше колесо — 2900 даже).
Тут важен вопрос по аккуумулятору. Разбирая готовый — получаешь и аккумулятор ( отдельно — 2500) и 2 колеса (даже если тоже по 2500*2=5000) итого 7500. Такчто готовый скутер на разборку — неплохой вариант.
Вопрос же №2 тоже по типу аккумулятора. Я также как и вы смотрел в строну свинцовых необслуживаемых ( т.е. не юзать литийнеоны от скутера). Правда еще пока даелеко не залезал в выборе, но мысля про тяговые лодочные -прекрасная. Вот тутже сразу стала куча выпадать: http://bigteh.ru/product/akkumuljator-deka-evu1-31-ach-glubokogo-razrjada/ . Характеристики также суперские у них.
Одна проблема (хотяи не особая) — вес. Батареи по 8.5*2 = 17 кг, + колеса ( их вес по 3.4 кг) итого — 24 кг (ну и + корпус 6 кг, пластик и алюминий). Итого 30 кг. В принципе вес в относительно норме, но изначально была мысля делать очень легкой конструкцию. Ее задача — возить саму себя + нагрузку до 30 кг. с невысокой скоростью (до 5-6 км\ч). Пробег до 20 км.в рабочую смену, подзарядка возможна каждой ночью. Дли литийиона вроде походящая задача, там вопрос тока циклов заряда и сохранности при длительном хранении без работы.
Грубо говоря, если сам робот был бы совсем легким ( в пределах 10-12 кг) и еще и складным, то его удобно былобы увозить с объекта чтобы заночь не сперли ( эта фиговина работает на улице).
Сами же свинцовые батареи хороши даже своей тяжестью ( они бы создали низкий центр внизу между колкесными парами по бокам), я тоже так и думал делать (просто чото не сомтрел пока в район тяговых а думал прототим просто на обычных компактных свинцовых сделать). Они и дешевле — по 1200 гдето. И даже если не особо долговечны — проще чаще на новые менять ? Но конеччто надо или литий оставлять или идти в строну предложенных Вами тяговых батарей. Их характеристики впечатляют. Наверно пусть лучше рабочие покорячутся с 30 кг.))))) зато мощща.
Электробайк. Контроллер двигателя своими руками
Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
Читайте также: Колодец для подвесного мотора
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
- Бытовая техника
- Оргтехника
- Электротранспорт
- Промышленность
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.
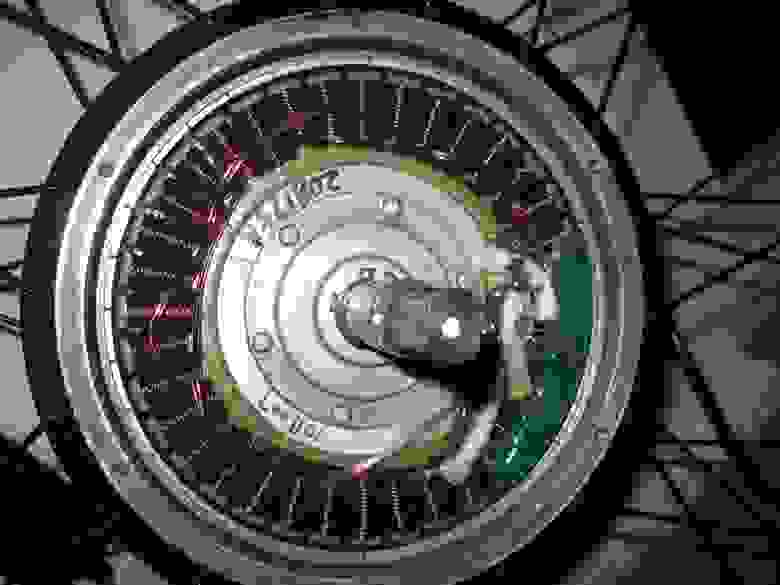
Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.
У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.
На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.
Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
Чтобы привести в движение трёхфазный двигатель, нужно рассмотреть цикл его работы за электрический оборот. Итак, имеем три фазы — A, B, C. Каждая из фаз получает положительную и отрицательную полярности в определённый момент времени. Поочерёдно по шагам пропускается ток от «плюса» одной фазы к «минусу» другой фазы. В итоге получается шесть шагов = три фазы × две полярности.
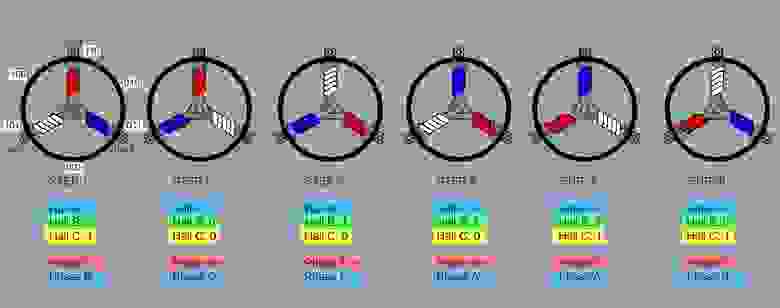
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Транзисторы и Н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.
Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.
Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
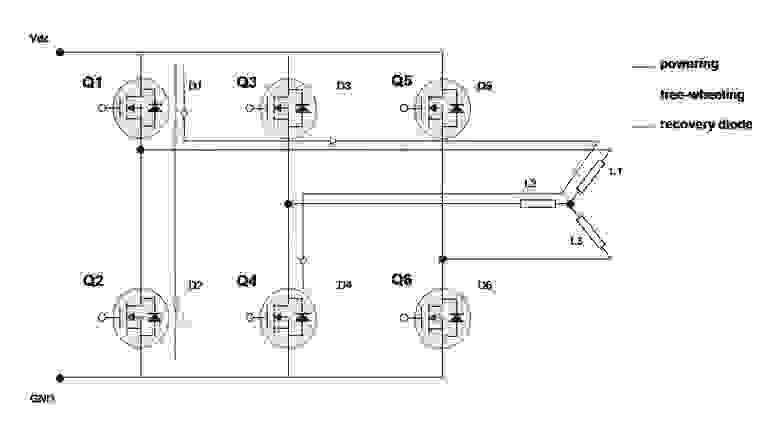
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Читайте также: Лодочный мотор hidea хайди hd3fhs 3 л с 2 такта
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.
Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
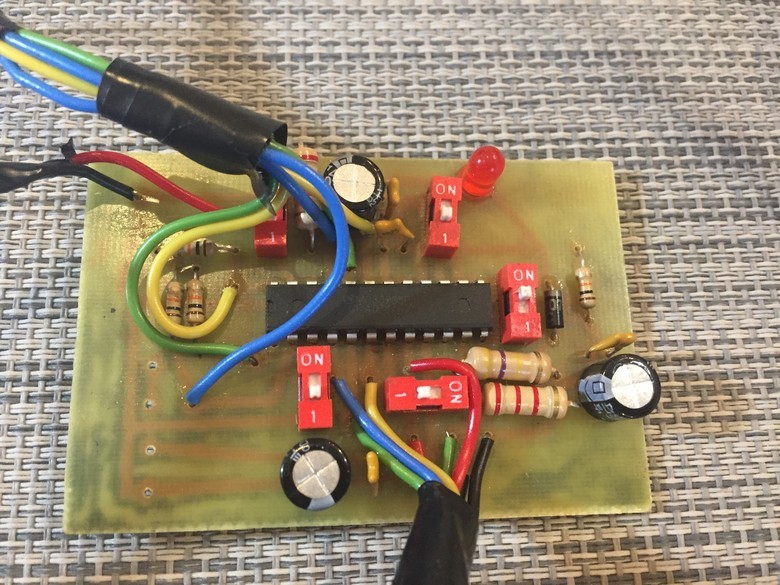
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.
- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
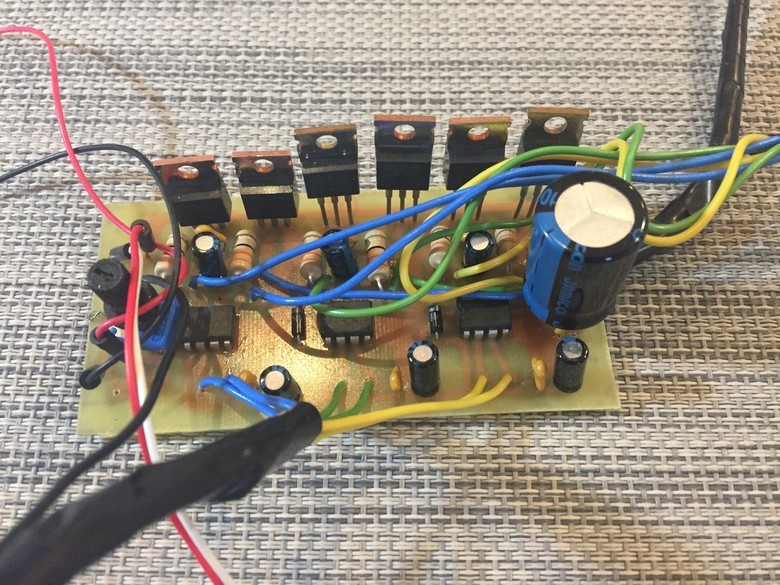
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Планы на будущее контроллера
Продолжая работу над контроллером, планирую сделать следующее:
- IGBT-транзисторы для H-моста вместо полевых транзисторов.
- Обвязку с защитами по току, перегреву и т. п.
- Полноценный круиз-контроль с возможностью выставлять необходимую скорость движения.
- Расходомер. Когда задаётся необходимое расстояние, а контроллер, исходя из этого значения и заряда аккумулятора, дозирует разряд аккумулятора на всём протяжении маршрута так, чтобы зарядки хватило.