В данной статье рассматривается наиболее простой способ подключения мотора постоянного тока к Arduino.
- Введение
- Необходимые компоненты
- Схема подключения
- Программинг
- Результаты
- Использование ШИМ для регулировки скорости мотора
- Схема подключения
- Результат
- Управление шаговым двигателем с помощью Arduino и потенциометра
- Общие принципы работы шаговых двигателей
- Расчет шагов на оборот для шагового двигателя
- Зачем нужен драйвер мотора для управления шаговым двигателем
- Работа схемы
- Объяснение программы для платы Arduino
- Работа проекта
- Исходный код программы
- 🎥 Видео
Видео:Управление моторами с ArduinoСкачать

Введение
Моторы постоянного тока нельзя подключать напрямую к Arduino. Это обусловлено тем, что пины не способны выдавать ток более 40 мА. Мотору же, в зависимости от нагрузки, необходимо несколько сотен миллиампер. Потому возникает потребность увеличения мощности. Делается это, как-правило, с помощью транзисторов.
В статье «Транзисторы: схема, принцип работы, чем отличаются биполярные и полевые» можно ознакомиться с основными типами транзисторов и их принципами работы.
Так же рекомендуется посмотреть: Видеоуроки по Arduino, 5-я серия — Моторы и транзисторы. В данном уроке Джереми Блюм рассказывает о подключении мотора постоянного тока к Arduino через биполярный транзистор.
Видео:Уроки Arduino. Управление моторами с библиотекой GyverMotorСкачать

Необходимые компоненты
Мы рассмотрим вариант взаимодействия с полевым транзистором. Принципы подключения мотора будут разобраны на конкретном железе: DC-мотор, плата Arduino, N-канальный полевой транзистор, резистор на 10 кОм (R1), резистор на 220 Ом (R2).
Вы же в своих экспериментах вольны использовать то, что есть в наличии. Важны лишь 3 условия:
Видео:Управление мотором ардуиноСкачать

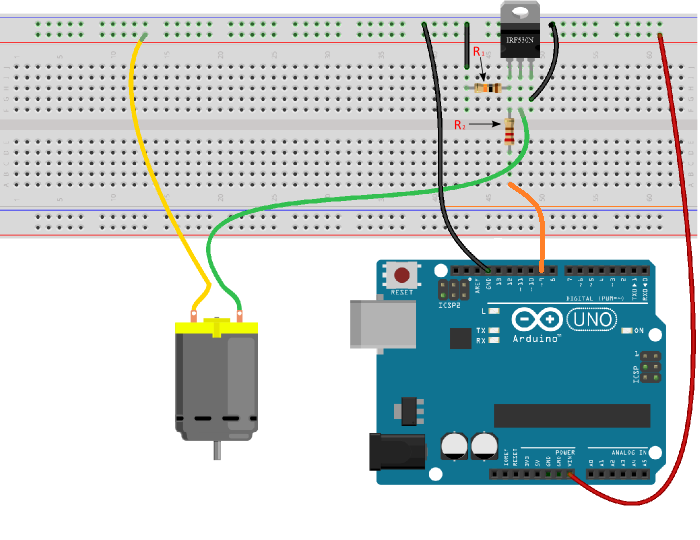
Схема подключения
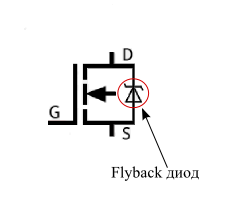
По-сути, обмотка мотора представляет собой катушку индуктивности. В момент подачи напряжения возникнет обратная электродвижущая сила, которая может вывести из строя транзистор. Flyback диод устанавливается в обратном направлении и предотвращает утечку тока с мотора на транзистор. Поэтому, если в транзисторе нет flyback диода, его необходимо установить дополнительно: анод на исток, катод на сток.
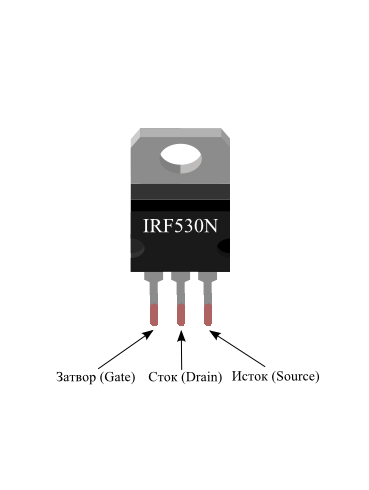
Транзистор IRF530N является мощным и поставляется в корпусе TO-220. Ниже приведена его распиновка.
В данной схеме транзистор будет работать в ключевом режиме: по одной команде (установка уровня HIGH на затворе) от Arduino транзистор будет подключать мотор к источнику питания (отпираться), по другой команде (установка уровня LOW на затворе) — отключать мотор от источника питания.
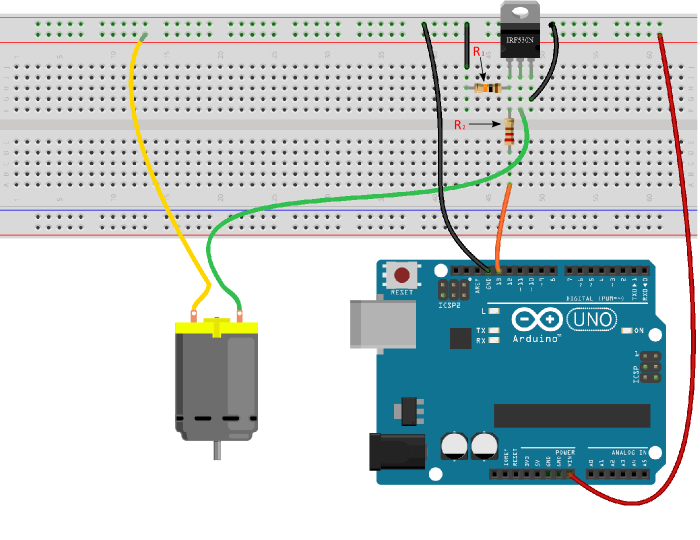
Резистор R1 подтягивает к земле затвор транзистора. Номинал не принципиален — можно использовать любые резисторы в диапазоне от 1 до 10 кОм. Резистор R2 служит для защиты пина микроконтроллера. Диапазон, примерно, от 10 до 500 Ом.
Чтобы запитать данную схему, можно подключить к Arduino внешний источник питания на 6-9 В, либо подать питание непосредственно на макетную плату ( синяя шина — минус, красная шина — плюс).
Видео:Управление мотором от стеклоочистителя с помощью драйвера MDDS30 через потенциометр в режиме ШИМСкачать

Программинг
Для наибольшей простоты воспользуемся, пожалуй, самым известным скетчем из готовых примеров — Blink.
Цифровой пин 13 раз в секунду меняет своё состояние. Когда на выходе устанавливается значение HIGH — загорается светодиод и начинает вращаться мотор. Когда устанавливается LOW — светодиод гаснет, а мотор останавливается.
Результаты
Была получена возможность подключать к выводам Arduino мощные устройства, в частности, моторы постоянного тока.
Видео:Уроки Arduino #10 - потенциометры и аналоговые пиныСкачать

Использование ШИМ для регулировки скорости мотора
Если мотором управлять ничуть не сложнее, чем светодиодом, то, наверное можно изменять яркость скорость вращения мотора точно так же, как при работе со светодиодами? Именно так! С точки зрения Arduino абсолютно не важно с чем мы имеем дело.
Как вы уже, наверно, могли догадаться, для изменения скорости вращения мотора нам понадобится скетч Fade.
Читайте также: Электронный впрыск 102 мотор
Видео:Уроки Arduino - управление сервомашинкойСкачать

Схема подключения
Чтобы использовать возможности функции analogWrite(..) , нам придётся перейти на один из пинов (3/5/6/9/10/11), поддерживающих аппаратный ШИМ. Поскольку, по умолчанию, в скетче Fade задействован 9-й пин, остановим свой выбор на нём.
Результат
Была получена возможность изменять скорость вращения мотора, используя аппаратный ШИМ Arduino.
На чём данная статья подходит к завершению. Теперь вы смело можете использовать моторы постоянного тока в своих проектах!
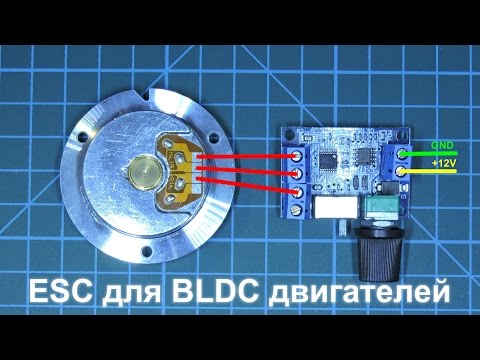
Видео:Уроки Arduino - управление бесколлекторным моторомСкачать

Управление шаговым двигателем с помощью Arduino и потенциометра
Шаговые двигатели с каждым годом приобретают все большую популярность в мире электроники поскольку именно они обеспечивают превосходную точность позиционирования различных механизмов. В этой статье мы рассмотрим подключение одного из самых распространенных шаговых двигателей 28-BYJ48 к плате Arduino при помощи модуля ULN2003 и управление им с помощью потенциометра.

В нашей предыдущей статье про подключение шагового двигателя к плате Arduino мы управляли углом его поворота из она монитора последовательной связи, в этом же проекте мы будем управлять поворотом шагового двигателя вращая ручку потенциометра. Если мы будем вращать ручку потенциометра по часовой стрелке, то и шаговый двигатель будет поворачиваться по часовой стрелке, а если мы ручку потенциометра будем поворачивать против часовой стрелки – то и шаговый двигатель будет вращаться против часовой стрелки.
Видео:ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]Скачать
![ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]](https://i.ytimg.com/vi/jJQwmnyfw5k/0.jpg)
Общие принципы работы шаговых двигателей
Внешний вид шагового двигателя 28-BYJ48 (купить на AliExpress) представлен на следующем рисунке:

Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
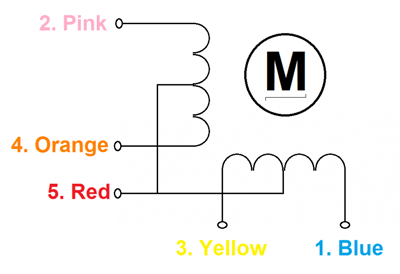
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28-BYJ48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
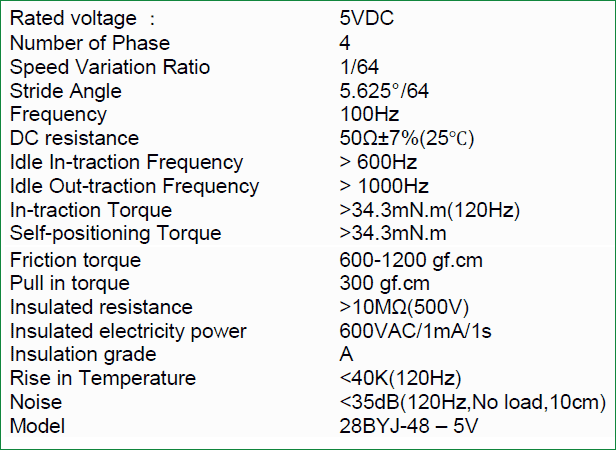
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Читайте также: Какие моторы бывают у газелей
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать.
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
Видео:Уроки Ардуино #11 - плавное управление нагрузкой, ШИМ сигналСкачать

Работа схемы
Схема устройства представлена на следующем рисунке.
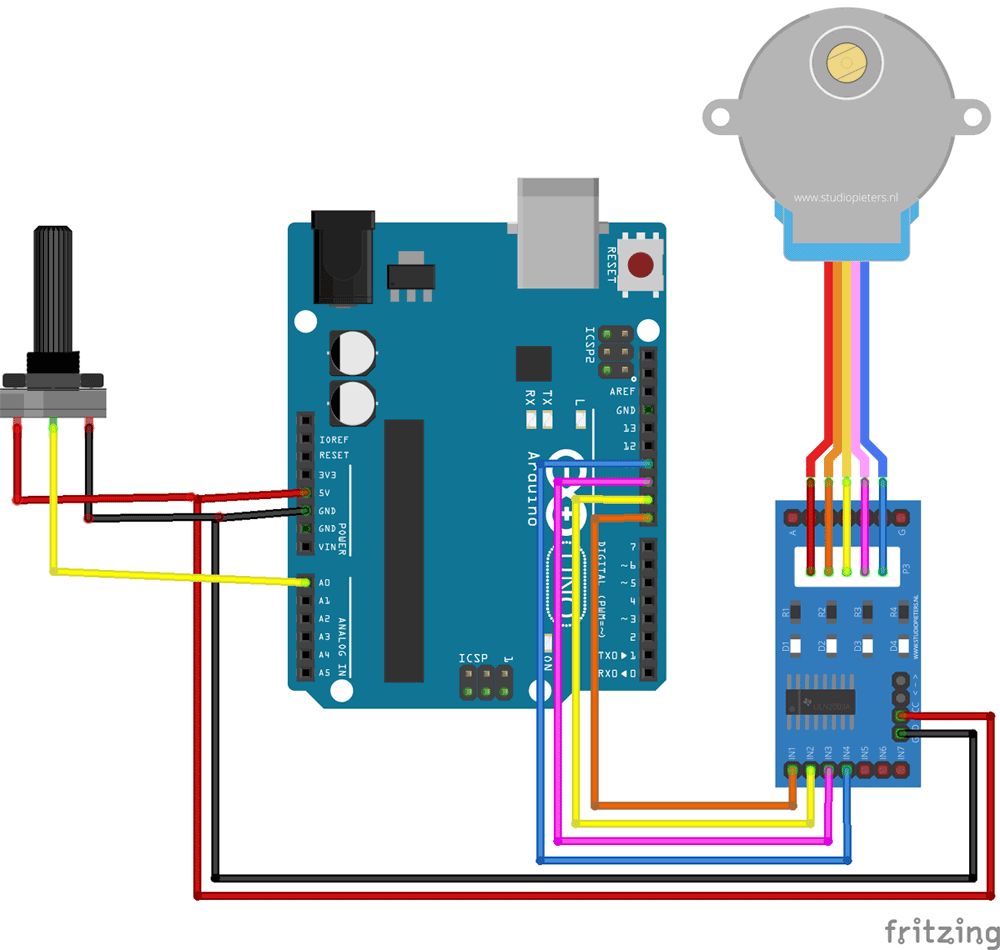
Чтобы подавать питание на соответствующие катушки шагового двигателя мы будем использовать цифровые контакты 8, 9, 10 и 11 платы Arduino, к которым подключены соответствующие контакты драйвера двигателей ULN2003. Потенциометр, с помощью которого мы будем управлять вращением шагового двигателя, подключен к аналоговому контакту A0 платы Arduino.
Драйвер мотора запитывается от контакта 5V платы Arduino. Но если вы будете подсоединять какую-нибудь нагрузку к шаговому двигателю, то вам потребуется внешний источник питания для драйвера мотора. Мы в нашем примере эксплуатируем шаговый двигатель без нагрузки, поэтому нам хватило питания от платы Arduino. И не забудьте соединить землю платы Arduino с землей драйвера мотора.
Видео:Что такое потенциометр или РЕОСТАТ и его применение. Часть 1.Скачать
Объяснение программы для платы Arduino
Перед тем как начать писать программу для платы Arduino давайте разберемся что должно происходить внутри этой программы. Как мы уже говорили ранее, мы будем использовать метод 4-шаговой последовательности, то есть нам нужно будет сделать 4 шага чтобы выполнить один полный оборот двигателя.
Читайте также: Рено каптур турбо мотор
| Номер шага | Контакты, на которое подается питание | Катушки, на которое подается питание |
| Шаг 1 | 8 и 9 | A и B |
| Шаг 2 | 9 и 10 | B и C |
| Шаг 3 | 10 и 11 | C и D |
| Шаг 4 | 11 и 8 | D и A |
На драйвере мотора есть 4 светодиода, по свечению которых можно судить о том, на какую катушку подается питание в конкретный момент. Более подробно все эти процессы можно посмотреть в видео, приведенном в конце статьи.
Мы напишем программу, в которой необходимое количество шагов для двигателя мы будем вводить в мониторе последовательного порта (serial monitor) платы Arduino. Полный текст программы приведен в конце статьи, здесь же мы рассмотрим наиболее важные его фрагменты.
Как мы рассчитали ранее, полное число шагов для полного оборота нашего шагового двигателя, равно 32, пропишем это в следующей строчке кода:
Далее мы должны сказать плате Arduino через какие ее контакты мы будем управлять шаговым двигателем (то есть к каким ее контактам подключен драйвер мотора).
Stepper stepper (STEPS, 8, 10, 9, 11);
Примечание: последовательность номеров контактов, указанная в приведенной команде (8,10,9,11) – специально упорядочена таким образом чтобы подавать питание на катушки шагового двигателя в правильном порядке. Если вы измените номера контактов, к которым подключен шаговый двигатель, то вы соответствующим образом должны их упорядочить для подачи в приведенную команду.
Мы будем использовать специальную библиотеку для работы с шаговыми двигателями, поэтому для задания скорости вращения шагового двигателя мы можем использовать команду вида:
Для двигателя 28-BYJ48 скорость вращения можно установить в диапазоне от 0 до 200.
Теперь, чтобы двигатель сделал один шаг, мы можем использовать следующую команду:
Количество шагов, которое должен сделать двигатель, определяется переменной “val”. Поскольку мы имеем 32 шага (для оборота) и передаточное число 64 мы должны сделать 2048 (32*64=2048) “шагов” в этой команде для совершения одного полного оборота двигателя.
Соответственно, чтобы шаговый двигатель сделал один шаг по часовой стрелке, необходимо использовать команду:
А один шаг против часовой стрелки:
В нашей программе мы будем считывать значение на аналоговом контакте A0 платы Arduino и сравнивать его с предыдущим значением (Pval). Если оно увеличилось, то мы будем делать 5 шагов двигателем по часовой стрелке, а если уменьшилось – то 5 шагов двигателем против часовой стрелки.
potVal = map(analogRead(A0),0,1024,0,500);
if (potVal>Pval)
stepper.step(5);
if (potVal
stepper.step(-5);
Pval = potVal;
Видео:Управление двигателем постоянного тока, линейным приводом. АрдуиноСкачать

Работа проекта
Когда вы сделаете все необходимые соединения в схеме данного проекта у вас должна получиться примерно следующая конструкция:

После этого загрузите программу в плату Arduino и откройте окно монитора последовательной связи (serial monitor). После этого вы можете вращать ручку потенциометра и наблюдать как в соответствии с ее поворотами шаговый двигатель будет вращаться по часовой и против часовой стрелки.
Видео:Управление двигателем постоянного тока. Схема управления мотором Ардуино проекты.Скачать

Исходный код программы
Код программы достаточно простой, я надеюсь у вас не вызовет никаких затруднений реализация данного проекта.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
🎥 Видео
Уроки Arduino. Работа с цифровым потенциометром и написание библиотекиСкачать

Уроки Arduino #8 - управление релеСкачать
Регулятор скорости для бесколлекторного двигателяСкачать
ЦИФРОВОЙ ПОТЕНЦИОМЕТР - Разбираемся как работает - (X9C103/104/503)Скачать
Управление сервоприводом с помощью потенциометраСкачать
подключение: мотор и потенциометр. ArduinoСкачать
Уроки Ардуино. Управление нагрузкой в сети переменного токаСкачать
ПОТЕНЦИОМЕТР. Как настроить ПЕРЕМЕННЫЙ РЕЗИСТОР на Arduino ?!Скачать