В этой статье мы будем подключать двигатель постоянного тока к Arduino Uno и управлять скоростью его вращения. Делать мы это будем с помощью ШИМ (широтно-импульсной модуляции, в англ. языке PWM — Pulse Width Modulation) – эта функция реализована в Arduino чтобы на основе постоянного напряжения иметь возможность получения изменяющегося напряжения.

- Общие принципы ШИМ
- Принцип работы H-моста
- Необходимые компоненты
- Работа схемы
- Исходный код программы
- Управление Ардуино с клавиатуры
- Управление Ардуино через компьютер
- Как управлять Ардуино с клавиатуры
- Скетч. Взаимодействие Ардуино и компьютера
- Пояснения к коду:
- Питание платы
- Питание от USB
- Питание в Vin
- Питание в 5V
- Автоматический выбор источника
- Питание “мощных” схем
- Автономное питание
- Arduino как источник питания
- Помехи и защита от них
- Индуктивные выбросы
- Главный Глупый Вопрос
- 💥 Видео
Видео:ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]Скачать
![ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]](https://i.ytimg.com/vi/jJQwmnyfw5k/0.jpg)
Общие принципы ШИМ
Метод осуществления ШИМ показан на следующем рисунке.
Если на представленном рисунке кнопка нажата, то двигатель начнет вращение и он будет вращаться до тех пор пока кнопка не будет отжата. Эта ситуация происходит если кнопка будет нажата постоянно – верхний график на представленном рисунке. Если же мы будем нажимать кнопку только в течение 8 мс из всего цикла в 10 мс, то в этом случае двигатель уже не будет в полной мере получать все напряжение батареи 9 В – в этом случае среднеквадратичная величина напряжения, получаемого двигателем, будет около 7 В. Соответственно, двигатель по сравнению с первым случаем (когда кнопка нажата постоянно) будет вращаться с меньшей скоростью. Поэтому цикл занятости (который еще называют коэффициентом заполнения ШИМ) в этом случае составит время включенного состояния/(время включенного состояния + время выключенного состояния) = 8/(8+2)=80%.
В следующих рассмотренных на рисунке случаях кнопка будет находиться в нажатом состоянии еще меньше чем в рассмотренном случае (80%). Соответственно, среднеквадратичная величина напряжения, получаемого двигателем, будет составлять еще меньшую величину, поэтому и скорость вращения двигателя также уменьшится. Это уменьшение скорости вращения двигателя вследствие уменьшения среднеквадратичной величины напряжения будет происходить до тех пор, пока получаемое двигателем напряжение не станет не достаточным для его вращения. То есть, изменяя величину цикла занятости (коэффициент заполнения ШИМ), можно управлять скоростью вращения двигателя постоянного тока.
Видео:Управление мотором ардуиноСкачать

Принцип работы H-моста
Перед тем, как переходить непосредственно к управлению двигателем, обсудим что такое H-BRIDGE (H-мост). Собранная нами далее схема будет осуществлять две функции: управлять двигателем постоянного тока с помощью управляющих сигналов малой мощности и изменять направление вращения двигателя.
Нам известно, что для изменения направления вращения двигателя постоянного тока необходимо изменить полярность приложенного к нему питающего напряжения. И как раз для смены полярности напряжения хорошо подходит устройство, называемое H-мостом. На представленном выше рисунке мы имеем 4 выключателя. Как показано на рисунке 2 если выключатели A1 и A2 замкнуты, то ток через двигатель течет справа налево как показано на второй части рисунка 2 – то есть в этом случае двигатель будет вращаться по часовой стрелке. А если выключатели A1 и A2 разомкнуты, а B1 и B2 – замкнуты, то ток через двигатель в этом случае будет протекать слева направо как показано на второй части рисунка, то есть двигатель будет вращаться против часовой стрелки. В этом и заключается принцип работы H-моста.
Мы в качестве H-моста будем использовать специализированную микросхему L293D, которую еще называют драйвером двигателей. Эта микросхема предназначена для управления двигателями постоянного тока малой мощности (см. рисунок) и содержит в своем составе два H-моста, то есть с ее помощью можно управлять двумя двигателями. Эта микросхема часто используется для управления двигателями в различных роботах.
В следующей таблице указаны необходимые значения напряжений на выводах INPUT1 и INPUT2 микросхемы L293D для смены направления вращения двигателя.
| Enable Pin | Input Pin 1 | Input Pin 2 | Motor Direction |
| High | Low | High | вправо |
| High | High | Low | влево |
| High | Low | Low | стоп |
| High | High | High | стоп |
То есть, чтобы двигатель вращался по часовой стрелке необходимо чтобы на 2A было напряжение высокого уровня (high), а на контакте 1A – напряжение низкого уровня (low). Аналогично для вращения двигателя против часовой стрелки необходимо обеспечить на 1A напряжение высокого уровня, а на 2A – низкого.
Как показано на следующем рисунке Arduino UNO имеет 6 ШИМ каналов (обозначенных на плате специальным знаком – тильдой), любой из которых мы можем использовать для получения изменяющего напряжения (на основе ШИМ). В данном проекте мы будем использовать в качестве ШИМ выхода контакт PIN3 Arduino UNO.

Видео:Управление моторами с ArduinoСкачать

Необходимые компоненты
- Плата Arduino UNO (купить на AliExpress).
- Драйвер двигателей L293D (купить на AliExpress).
- Электродвигатель постоянного тока.
- Светодиод (купить на AliExpress).
- Резистор 10 кОм (2 шт.) (купить на AliExpress).
- Кнопка (2 шт.).
- Конденсатор 100 пФ (купить на AliExpress).
- Переключатель.
- Источник питания с напряжением 5 В.
Видео:Управление двигателем постоянного тока. Схема управления мотором Ардуино проекты.Скачать

Работа схемы
Схема устройства (на макетной плате) представлена на следующем рисунке.
В рассматриваемой схеме мы имеем две кнопки, у каждой из которых, естественно, будет присутствовать эффект, называемый «дребезгом контактов». Но в данном случае для нас он не будет нести никакого негативного эффекта и не будет вызывать ошибок в работе схемы.
На нашем сайте мы уже рассматривали управление ШИМ с помощью микроконтроллера AVR ATmega и это управление было не самым простым делом – необходимо было сконфигурировать различные регистры. В отличие от этого управление ШИМ в Arduino UNO является крайне простым занятием, не требующем всего этого.
Видео:ЭЛЕКТРОНИКА - Обзор драйвера моторов MX1508 для ArduinoСкачать

Исходный код программы
По умолчанию все необходимые заголовочные файлы подключаются автоматически самой средой ARDUINO IDE, она же конфигурирует сама и все регистры, необходимые для работы ШИМ, поэтому нам в программе уже не нужно заботиться об этих вещах. Все что нам нужно будет сделать – это определить на каком контакте мы будем использовать ШИМ.
То есть для использования ШИМ на нужном контакте нам необходимо сделать следующие вещи:
pinMode(ledPin, OUTPUT)
analogWrite(pin, value)
analogWriteResolution(neededresolutionnumber)
Сначала мы должны выбрать один из доступных 6 выходов (контактов) ШИМ. Потом необходимо установить этот контакт в режим на вывод данных.
После этого мы должны задействовать функции ШИМ на этом выходе используя функцию “ analogWrite(pin, value) ”. Здесь ‘pin’ обозначает номер контакта, на котором мы будем использовать ШИМ, в нашем случае это будет 3-й контакт.
Value в этой функции представляет собой цикл занятости (коэффициент заполнения) ШИМ, оно может принимать значения от 0 (всегда выключено) до 255 (всегда включено). Мы будем увеличивать и уменьшать это значение с помощью кнопок, присутствующих на схеме.
Плата Arduino UNO имеет максимальное разрешение (разрешающую способность) ШИМ, равную 8, что означает что value в функции analogWrite(pin, value) может принимать значения от 0 до 255. Но если в этом есть необходимость, мы можем уменьшать разрешение ШИМ используя функцию “ analogWriteResolution() ”, в скобках которой мы можем записать число в диапазоне 4-8, которое и будет определять разрешающую способность ШИМ платы Arduino UNO.
Читайте также: Комплект лодка пвх мотор сузуки
Переключатель на схеме служит для изменения направления вращения двигателя.
А теперь непосредственно сам код программы с комментариями.
Видео:Уроки Arduino. Управление моторами с библиотекой GyverMotorСкачать

Управление Ардуино с клавиатуры
Управление Arduino с компьютера через USB ► представим несколько программ (скетчей) для управления платы Ардуино через компьютер и включения светодиода.
Как управлять Ардуино с компьютера через USB. Расскажем, как произвести включение светодиода и управлять сервомотором на Arduino с клавиатуры через функцию Serial.available() и Serial.read(). Данные функции проверяют, поступают ли какие-то команды на микроконтроллер по последовательному порту, а затем считывают поступающие команды, вводимые в Serial monitor с компьютера.
Видео:Уроки Arduino #8 - управление релеСкачать

Управление Ардуино через компьютер
Функция Serial.available() получает количество байт доступных для чтения из последовательного порта. Это те байты которые отправлены с компьютера и записаны в буфер последовательного порта. Буфер Serial monitor Arduino может хранить максимум до 64 байт. Функция используется также при взаимодействии Bluetooth модуля к Ардуино и полезна при отладке устройства на этапе проектирования.
При тестировании и настройке различных устройств, управляемых через Bluetooth, например, роботом или Лодкой на Ардуино вам пригодится знание, как управлять светодиодом и сервомотором через компьютер. Поэтому рассмотрим сейчас простое управление сервоприводом через компьютер по USB кабелю. При этом через монитор можно отправлять не только цифры, но и буквы латинского алфавита.
Видео:Драйвер двигателей L298N - Обзор, Тест, Подключение к ArduinoСкачать

Как управлять Ардуино с клавиатуры
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- макетная плата;
- светодиод и резистор 220 Ом;
- сервопривод;
- провода «папа-папа» и «папа-мама».
Остальные исполнительные устройства для Arduino UNO вы можете взять на свое усмотрение и самостоятельно попробовать управлять ими через компьютер с помощью USB кабеля. Соберите на макетной плате схему с одним светодиодом из первого занятия Что такое Ардуино и как им пользоваться, а после сборки схемы со светодиодом загрузите следующий скетч в микроконтроллер.
Скетч. Взаимодействие Ардуино и компьютера
Пояснения к коду:
- функция Serial.available() проверяет поступление команд с компьютера;
- функция Serial.read() читает данные, поступившие в Serial monitor.
- в условном операторе if (val == ‘1’) стоит знак двойное равенство «соответствие», а в скобках необходимо использовать одинарные кавычки.
Управление сервоприводом на Arduino UNO с компьютера
После сборки схемы загрузите следующий скетч в плату
Видео:Модуль драйвера двигателей L298N и ArduinoСкачать

Питание платы
Данный раздел имеет довольно таки большую значимость, если делать что то не так, как написано здесь, можно получить сгоревшую плату или глюки, причины которых не так очевидны и отследить их очень трудно. Если вы ожидали увидеть здесь советы по энергосбережению и режимам сна – они находятся в отдельном уроке про энергосбережение.
Перейдем к питанию платы: есть три способа питать Ардуино и вообще Ардуино-проект в целом, у каждого есть свои плюсы/минусы и особенности:
- Бортовой USB порт
- “Сырой” вход на микроконтроллер 5V
- Стабилизированный вход Vin
Что касается земли (пины GND) то они все связаны между собой и просто продублированы на плате, это нужно запомнить. Пины 3.3V, 5V и GND являются источником питания для датчиков и модулей, но давайте рассмотрим особенности.
Видео:Mosfet Модуль IRF520 и ESP 8266. ШИМ управление двигателем или светомСкачать

Питание от USB
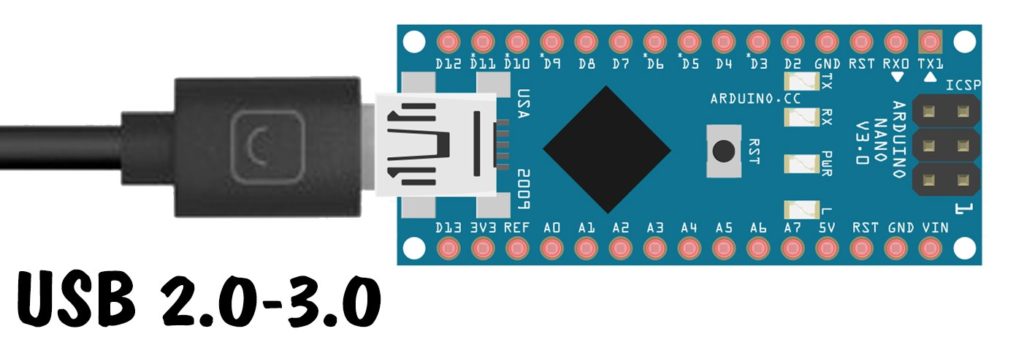
Питание от USB – самый плохой способ питания ардуино-проекта. Почему? По линии питания +5V от USB стоит диод, выполняющий защитную функцию: он защищает порт USB компьютера от высокого потребления тока компонентами ардуино-проекта или от короткого замыкания (КЗ), которое может произойти по случайности/криворукости любителей ковырять макетные платы. КЗ продолжительностью менее секунды не успеет сильно навредить диоду и всё может обойтись, но продолжительное замыкание превращает диод в плавкий предохранитель, выпускающий облако синего дыма и спасающий порт компьютера от такой же участи.
К слову, ардуинки от производителя Robotdyn имеют самовосстанавливающийся предохранитель вместо такого костыля с диодом-смертником.
Слаботочный диод имеет ещё одну неприятную особенность: на нём падает напряжение, причем чем больше ток потребления схемы, тем сильнее падает напряжение питания. Пример: голая ардуина без всего потребляет около 20 мА, и от 5 Вольт на юсб после диода нам остаётся примерно 4.7 Вольт. Чем это плохо: опорное напряжение при использовании АЦП крайне нестабильно, не знаешь, что измеряешь (да, есть способ измерения опорного напряжения, но делать это нужно вручную). Некоторые железки чувствительны к напряжению питания, например LCD дисплеи: при питании от 5V они яркие и чёткие, при 4.7 вольтах (питание от юсб) они уже заметно теряют яркость. Если подвигать сервоприводом или включить реле – на диоде упадет ещё больше и дисплей практически погаснет. При коротких мощных нагрузках (выше 500-600ма) микроконтроллер перезапустится, так как напряжение упадет ниже плинтуса.
Вы наверное предложите заменить диод перемычкой, чтобы питать схему от USB большим током, например от powerbank’а. Так делать тоже нельзя, потому что дорожки на плате не рассчитаны на большие токи (дорожка 5V очень тонкая и идёт через всю плату). Я думаю, что можно будет снять 1-2 Ампера с пина 5V, но, скорее всего, напряжение просядет. Также при КЗ вы скорее всего попрощаетесь с дорожкой вообще. Питайте силовую часть схемы либо отдельно, либо от того же источника питайте Arduino.
Видео:Как подключить шаговый двигатель к ArduinoСкачать

Питание в Vin
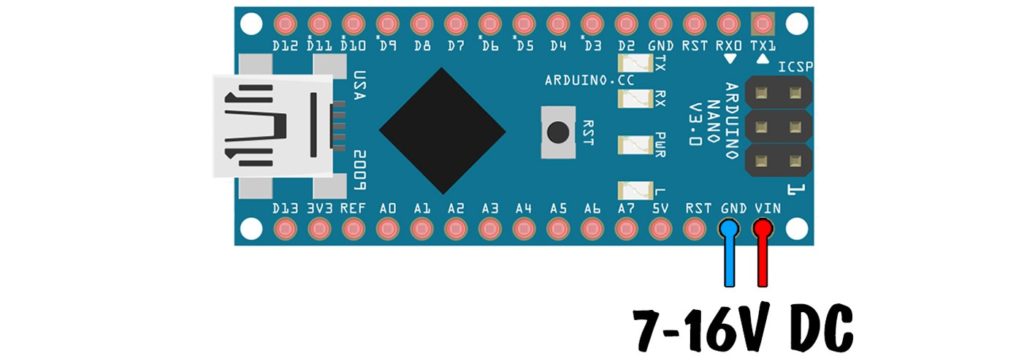
Питание в пин Vin (и GND) – более универсальный способ питания ардуино-проекта, этот пин заводит питание на бортовой стабилизатор напряжения ардуино, на китайских платах обычно стоит AMS1117-5.0. Это линейный стабилизатор, что имеет свои плюсы и минусы. Он позволяет питать ардуино и ардуино-проект от напряжения 7-12 Вольт (это рекомендуемый диапазон, так то питать можно от 5 до 20 Вольт). Стабилизатор устроен так, что он выдает хорошее ровное напряжение с минимальными пульсациями, но всё лишнее напряжение превращает в тепло. Если питать плату и один миниатюрный сервопривод от 12 Вольт, то при активной работе привода стабилизатор нагреется до 70 градусов, что уже ощутимо горячо. По некоторым расчетам из даташита можем запомнить некоторые цифры:
- При напряжении 7 Вольт (таких блоков питания я не встречал) в Vin можно снять с пина 5V до 2A, больше – перегрев. Отлично сработают два литиевых аккумулятора
- При 12 Вольтах на Vin можно снять с пина 5V не более 500мА без риска перегрева стабилизатора.
Читайте также: Щетки для мотора отопителя форд фокус 2
Питание в пин Vin возможно только в том случае, если в Ардуино проекте (имеется в виду плата Ардуино и железки, подключенные к 5V и GND) не используются мощные потребители тока, такие как сервоприводы, адресные светодиодные ленты, моторчики и прочее. Что можно: датчики, сенсоры, дисплеи, модули реле (не более 3 одновременно в активном состоянии), одиночные светодиоды, органы управления. Для проектов с мощной 5 Вольтовой нагрузкой для нас есть только третий способ.
Видео:Управление шаговым двигателем. Драйвер A4988, подключение и настройкаСкачать

Питание в 5V
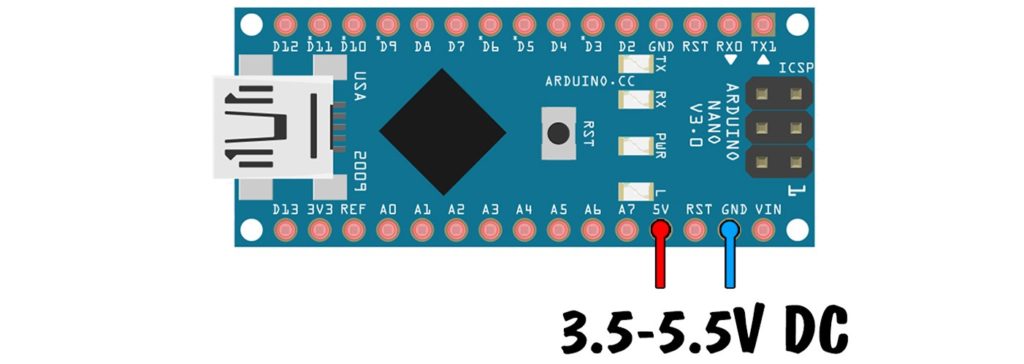
Питание в пин 5V (и GND) – самый лучший вариант питать плату и ардуино-проект в целом, но нужно быть аккуратным: пин идёт напрямую на микроконтроллер, и на него действуют некоторые ограничения:
- Максимальное напряжение питания согласно даташиту на микроконтроллер – 5.5V. Всё что выше – с большой вероятностью выведет МК из строя;
- Минимальное напряжение зависит от частоты, на которой работает МК. Вот строчка из даташита: 0 – 4 MHz @ 1.8 – 5.5V, 0 – 10 MHz @ 2.7 – 5.5V, 0 – 20 MHz @ 4.5 – 5.5V. Что это значит: большинство Arduino-плат имеют источник тактирования на 16 MHz, то есть Arduino будет стабильно работать от напряжения
4 Вольта (20 МГц – 4.5V, 16 МГц – около 4V). Есть версии Arduino на 8 МГц, они будут спокойно работать от напряжения 2.5V.
Важно: напряжение питания в пин 5V не должно превышать 5.5V. Минимальное напряжение: 4V для плат на 16 МГц (на моей практике работало стабильно от 3.5V), 2.5V для плат на 8 МГц.
Самый популярный вариант – USB зардяник от смартфона, их легко достать, диапазон токов от 500ма до 3А – справится практически с любым проектом. Отрезаем штекер и паяем провода на 5V и GND, предварительно определив, где плюс/минус при помощи мультиметра или по цвету: красный всегда плюс, чёрный – земля, при красном плюсе земля может быть белого цвета. При чёрной земле плюс может быть белым, вот так вот. Точно туда же паяем все датчики/модули/потребители 5 Вольт. Да, не очень удобно это паять, но при известной схеме можно аккуратно собрать всё питание в отдельные скрутки и припаять уже их. Пример на фото ниже. Источником питания там является отдельное гнездо micro-usb, зелёная плата сразу над дисплеем.
Видео:Arduino: ШИМ управление двигателем постоянного тока 12-48в и болееСкачать

Автоматический выбор источника

На платах Arduino (на китайских клонах в том числе) реализовано автоматическое переключение активного источника питания: при подключении внешнего питания на пин Vin линия питания USB блокируется. Если кому интересно, на схеме платы Arduino это выглядит вот так:
Видео:ЭБУ на Ардуино!? ДА! Когда сгорел блок управления, а денег нетСкачать

Питание “мощных” схем
Резюмируя и повторяя всё сказанное выше, рассмотрим варианты питания проектов с большим потреблением тока.
Питать мощный проект (светодиоды, двигатели, нагреватели) от 5V можно так: Arduino и потребитель питаются вместе от 5V источника питания:
Питать мощный потребитель от USB через плату нельзя, там стоит диод, да и дорожки питания тонкие:
Что делать, если всё-таки хочется питать проект от USB, например от powerbank’а? Это ведь удобно! Всё очень просто:
Если есть только блок питания на 12V, то у меня плохие новости: встроенный стабилизатор на плате не вытянет больше 500 мА:
Но если мы хотим питать именно 12V нагрузку, то проблем никаких нет: сама плата Arduino потребляет около 20 мА, и спокойно будет работать от бортового стабилизатора:
Видео:#071 ARDUINO 05 Управление двигателем с помощью модуля на L298NСкачать

Автономное питание
- Питание в порт USB
- Любой блок питания/зарядник от ноута с напряжением 7-18 Вольт
- 9V батарейка “Крона” – плохой, но рабочий вариант. Ёмкость кроны очень небольшая;
- Сборка из трёх литиевых аккумуляторов: напряжение 12.6-9V в процессе разряда. Хороший вариант, также имеется 12V с хорошим запасом по току (3А для обычных, 20А для высокотоковых аккумуляторов) для двигателей или светодиодных лент;
- “Модельные” аккумуляторы, в основном Li-Po. В целом то же самое, что предыдущий пункт, но запаса по току в разы больше;
- Энергосбережение – не очень выгодный вариант, т.к. стабилизатор потребляет небольшой, но всё же ток;
- Максимальный выходной ток с пина 5V при питании в Vin: 2А при 7V на Vin, 500ma при 12V на Vin
- Для стабильных 5V на выходе – литиевый аккумулятор и повышающий до 5V модуль. У таких модулей обычно запас по току 2А, также модуль потребляет “в холостом режиме” – плохое энергосбережение;
- Литиевый аккумулятор – напряжение на пине 5V и GPIO будет 4.2-3.5V, некоторые модули будут работать, некоторые – нет. Работа МК от напряжения ниже 4V не гарантируется, у меня работало в целом стабильно до 3.5V, ниже уже может повиснуть. Энергосбережение – отличное;
- Пальчиковые батарейки (ААА или АА) – хороший вариант, 3 штуки дадут 4.5-3V, что граничит с риском зависнуть. 4 штуки – очень хорошо. Новые батарейки дадут 6V, что является максимальным напряжением для МК AVR и при желании можно так работать;
- Пальчиковые Ni-Mh аккумуляторы – отличный вариант, смело можно ставить 4 штуки, они обеспечат нужное напряжение на всём цикле разряда (до 4V). Также имеют хороший запас по току, можно даже адресную ленту питать.
- Платы с кварцем (тактовым генератором) на 8 МГц позволяют питать схему от низкого напряжения (2.5V, как мы обсуждали выше), отлично подойдут те же батарейки/аккумуляторы, также для маломощные проекты можно питать от литиевой таблетки (3.2-2.5V в процессе разряда).
- Максимальный выходной ток с пина 5V ограничен током источника питания
- Питание датчиков и модулей от 5V
- При питании платы от USB – максимальный ток 500 мА
- При питании платы в Vin – максимальный ток 2 А при Vin 7V, 500 мА при Vin 12V
- При питании платы в 5V – максимальный ток зависит от блока питания
Видео:Уроки Arduino - управление бесколлекторным моторомСкачать

Помехи и защита от них
Если в одной цепи питания с Ардуино стоят мощные потребители, такие как сервоприводы, адресные светодиодные ленты, модули реле и прочее, на линии питания могут возникать помехи, приводящие к сильным шумам измерений с АЦП, а более мощные помехи могут дергать прерывания и даже менять состояния пинов, нарушая связь по различным интерфейсам связи и внося ошибки в показания датчиков, выводя чушь на дисплеи, а иногда дело может доходить до перезагрузки контроллера или его зависания. Некоторые модули также могут зависать, перезагружаться и сбоить при плохом питании, например bluetooth модуль спокойно может зависнуть и висеть до полной перезагрузки системы, а радиомодули rf24 вообще не будут работать при “шумном” питании.
Более того, помеха может прийти откуда не ждали – по воздуху, например от электродвигателя, индуктивный выброс ловится проводами и делает с системой всякое. Что же делать? “Большие дяди” в реальных промышленных устройствах делают очень много для защиты от помех, этому посвящены целые книги и диссертации. Мы с вами рассмотрим самое простое, что можно сделать дома на коленке.
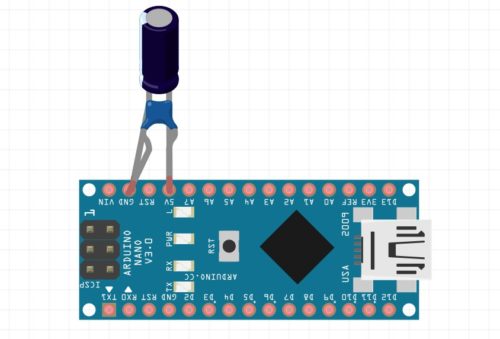
- Питать логическую часть (Ардуино, слаботочные датчики и модули) от отдельного малошумящего блока питания 5V, то есть разделить питание логической и силовой частей, а ещё лучше питаться в пин Vin от блока питания на 7-12V, так как линейный стабилизатор даёт очень хорошее ровное напряжение. Для корректной работы устройств, питающихся отдельно (драйверы моторов, приводы) нужно соединить земли Ардуино и всех внешних устройств;
- Поставить конденсаторы по питанию платы, максимально близко к пинам 5V и GND: электролит 6.3V 100-470 uF (мкФ, ёмкость зависит от качества питания: при сильных просадках напряжения ставить ёмкость больше, при небольших помехах хватит и 10-47 мкФ) и керамический на 0.1-1 uF. Это сгладит помехи даже от сервоприводов;
- У “выносных” на проводах элементах системы (кнопки, крутилки, датчики) скручивать провода в косичку, преимущественно с землёй. А ещё лучше использовать экранированные провода, экран естественно будет GND. Таким образом защищаемся от электромагнитных наводок;
- Соединять все земли одним толстым проводом и по возможности заземлять на центральное заземление;
- Металлический и заземленный корпус устройства (или просто обернутый фольгой ? ), на который заземлены все компоненты схемы – залог полного отсутствия помех и наводок по воздуху.
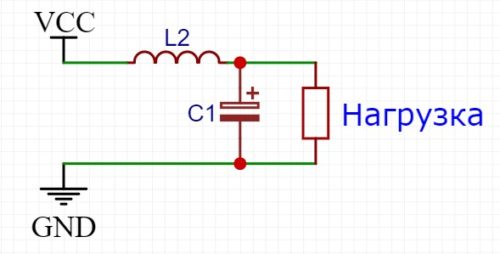
Ещё лучше с фильтрацией помех справится LC фильтр, состоящий из индуктивности и конденсатора. Индуктивность нужно брать с номиналом в районе 100-300 мкГн и с током насыщения больше, чем ток нагрузки после фильтра. Конденсатор – электролит с ёмкостью 100-1000 uF в зависимости опять же от тока потребления нагрузки после фильтра. Подключается вот так, чем ближе к нагрузке – тем лучше:
Подробнее о расчёте фильтров можно почитать здесь.
Индуктивные выбросы
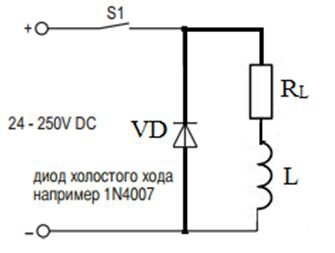
На практике самая подлая помеха обычно приходит при коммутации индуктивной нагрузки при помощи электромагнитного реле: от такой помехи очень сложно защититься, потому что приходит она по земле, то есть вас не спасёт даже раздельное питание проекта. Что делать?
- Для цепей постоянного тока обязательно ставить мощный диод обратно-параллельно нагрузке, максимально близко к клеммам реле. Диод примет (замкнёт) на себя индуктивный выброс от мотора/катушки;
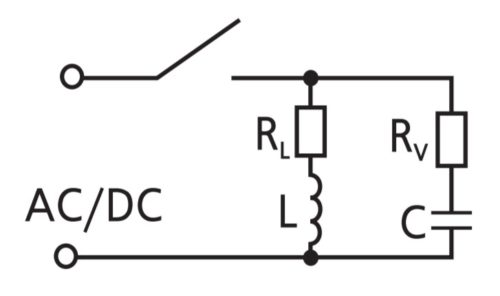
- Туда же, на клеммы реле, можно поставить RC цепочку, называемую в этом случае искрогасящей: резистор 39 Ом 0.5 Вт, конденсатор 0.1 мкФ 400V (для цепи 220В);
- Для сетей переменного тока использовать твердотельное (SSR) реле с детектором нуля (Zero-cross detector), они же называются “бесшумные” реле. Если в цепи переменного тока вместо реле стоит симистор с оптопарой, то оптопару нужно использовать опять же с детектором нуля, такая оптопара, как и SSR zero-cross будут отключать нагрузку в тот момент, когда напряжение в сети переходит через ноль, это максимально уменьшает все выбросы.
Подробнее об искрогасящих цепях можно почитать вот в этой методичке.
Видео:Подключение двигателя без электроники и Ардуино!Скачать
Главный Глупый Вопрос
У новичков в электронике, которые не знают закон Ома, очень часто возникают вопросы вида: “а каким током можно питать Ардуино“, “какой ток можно подать на Ардуино“, “не сгорит ли моя Ардуина от от блока питания 12V 10A“, “сколько Ампер можно подавать на Arduino” и прочую чушь. Запомните: вы не можете подать Амперы, вы можете подать только Вольты, а устройство возьмёт столько Ампер, сколько ему нужно. В случае с Arduino – голая плата возьмёт 20-22 мА, хоть от пина 5V, хоть от Vin. Ток, который указан на блоке питания, это максимальный ток, который БП может отдать без повреждения/перегрева/просадки напряжения. Беспокоиться стоит не об Arduino, а об остальном железе, которое стоит в схеме и питается от блока питания, а также о самом блоке питания, который может не вывезти вашу нагрузку (мотор, светодиоды, обогреватель). Общий ток потребления компонентов не должен превышать возможностей источника питания, вот в чём дело. А будь блок питания хоть на 200 Ампер – компоненты возьмут ровно столько, сколько им нужно, и у вас останется “запас по току” для подключения других. Если устройство питается напряжением, то запомните про максимальный ток источника питания очень простую мысль: кашу маслом не испортишь.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
💥 Видео
ЭТО ГЕНИАЛЬНО! Что я сделал из зарядного от телефона!Скачать
Управление двигателем постоянного тока NodeMCU + MX1508Скачать
- Самый обыкновенный Powerbank, максимальный ток – 500 мА (помним про защитный диод). Напряжение на пине 5V и высокий уровень GPIO в этом случае будет равен
Видео:Подключение энкодера к Ардуино. Управление мотором энкодер.Скачать

Arduino как источник питания
Важный момент, который вытекает из предыдущих: использование платы Arduino как источник питания для модулей/датчиков. Варианта тут два: