
В данной статье рассматривается наиболее простой способ подключения мотора постоянного тока к Arduino.
Введение
Моторы постоянного тока нельзя подключать напрямую к Arduino. Это обусловлено тем, что пины не способны выдавать ток более 40 мА. Мотору же, в зависимости от нагрузки, необходимо несколько сотен миллиампер. Потому возникает потребность увеличения мощности. Делается это, как-правило, с помощью транзисторов.
В статье «Транзисторы: схема, принцип работы, чем отличаются биполярные и полевые» можно ознакомиться с основными типами транзисторов и их принципами работы.
Так же рекомендуется посмотреть: Видеоуроки по Arduino, 5-я серия — Моторы и транзисторы. В данном уроке Джереми Блюм рассказывает о подключении мотора постоянного тока к Arduino через биполярный транзистор.
Необходимые компоненты
Мы рассмотрим вариант взаимодействия с полевым транзистором. Принципы подключения мотора будут разобраны на конкретном железе: DC-мотор, плата Arduino, N-канальный полевой транзистор, резистор на 10 кОм (R1), резистор на 220 Ом (R2).
Вы же в своих экспериментах вольны использовать то, что есть в наличии. Важны лишь 3 условия:
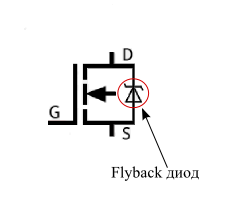
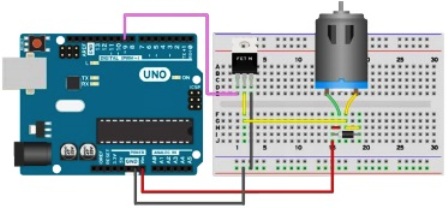
Схема подключения
По-сути, обмотка мотора представляет собой катушку индуктивности. В момент подачи напряжения возникнет обратная электродвижущая сила, которая может вывести из строя транзистор. Flyback диод устанавливается в обратном направлении и предотвращает утечку тока с мотора на транзистор. Поэтому, если в транзисторе нет flyback диода, его необходимо установить дополнительно: анод на исток, катод на сток.
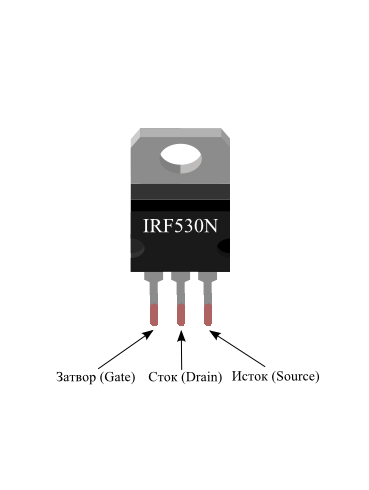
Транзистор IRF530N является мощным и поставляется в корпусе TO-220. Ниже приведена его распиновка.
В данной схеме транзистор будет работать в ключевом режиме: по одной команде (установка уровня HIGH на затворе) от Arduino транзистор будет подключать мотор к источнику питания (отпираться), по другой команде (установка уровня LOW на затворе) — отключать мотор от источника питания.
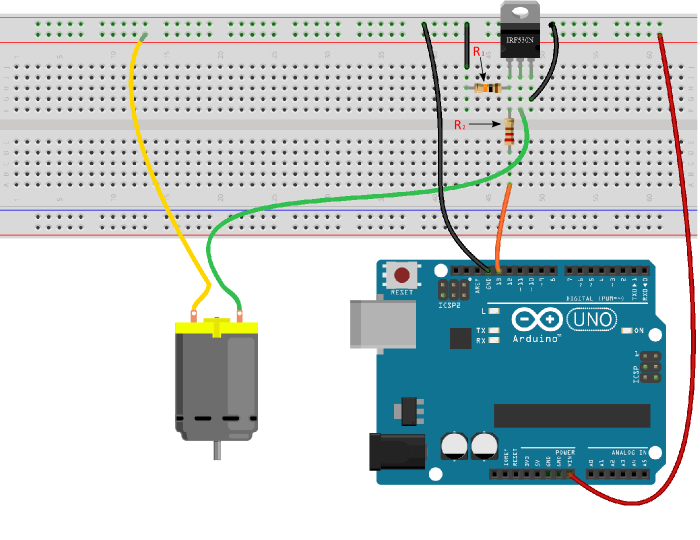
Резистор R1 подтягивает к земле затвор транзистора. Номинал не принципиален — можно использовать любые резисторы в диапазоне от 1 до 10 кОм. Резистор R2 служит для защиты пина микроконтроллера. Диапазон, примерно, от 10 до 500 Ом.
Чтобы запитать данную схему, можно подключить к Arduino внешний источник питания на 6-9 В, либо подать питание непосредственно на макетную плату ( синяя шина — минус, красная шина — плюс).
Программинг
Для наибольшей простоты воспользуемся, пожалуй, самым известным скетчем из готовых примеров — Blink.
Цифровой пин 13 раз в секунду меняет своё состояние. Когда на выходе устанавливается значение HIGH — загорается светодиод и начинает вращаться мотор. Когда устанавливается LOW — светодиод гаснет, а мотор останавливается.
Результаты
Была получена возможность подключать к выводам Arduino мощные устройства, в частности, моторы постоянного тока.
Использование ШИМ для регулировки скорости мотора
Если мотором управлять ничуть не сложнее, чем светодиодом, то, наверное можно изменять яркость скорость вращения мотора точно так же, как при работе со светодиодами? Именно так! С точки зрения Arduino абсолютно не важно с чем мы имеем дело.
Как вы уже, наверно, могли догадаться, для изменения скорости вращения мотора нам понадобится скетч Fade.
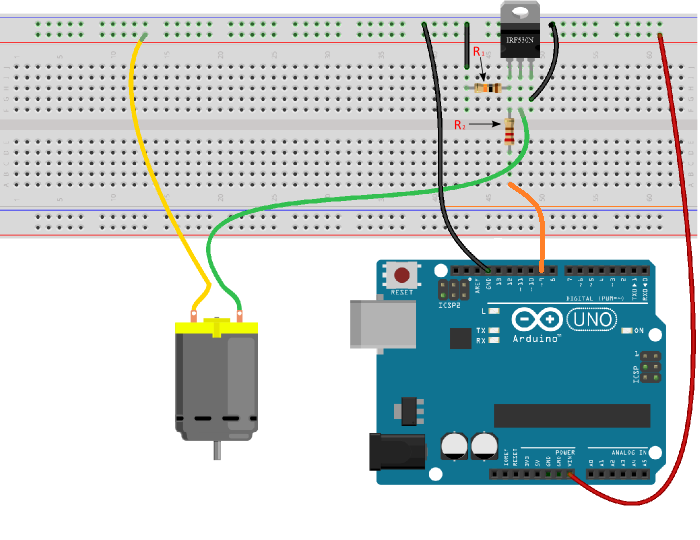
Схема подключения
Чтобы использовать возможности функции analogWrite(..) , нам придётся перейти на один из пинов (3/5/6/9/10/11), поддерживающих аппаратный ШИМ. Поскольку, по умолчанию, в скетче Fade задействован 9-й пин, остановим свой выбор на нём.
Результат
Была получена возможность изменять скорость вращения мотора, используя аппаратный ШИМ Arduino.
На чём данная статья подходит к завершению. Теперь вы смело можете использовать моторы постоянного тока в своих проектах!
Управление двигателями и сервоприводами с помощью Ардуино
Из этой статьи вы узнаете:
Что такое двигатель постоянного тока,
Как управлять скоростью вращения двигателя постоянного тока,
Как подключить двигатель к Arduino,
Как управлять сервоприводом.
В простых конструкциях систем автоматизации часто возникает необходимость не только считывать показания датчиков, но и приводить в движение механизмы. Для этого используются разнообразные электродвигатели.
Самый простой и популярный вариант — это двигатель постоянного тока. Он завоевал любовь любителей своей доступностью, простотой регулировки оборотов. Если стоит задача перемещать какой-либо механизм на заданный угол или расстояние удобно использовать сервопривод или шаговый двигатель.
Читайте также: Руководство по ремонту лодочного мотора сузуки 30
В этой статье мы рассмотрим сервоприводы и небольшие двигатели постоянного тока, их подключение к плате Arduino и регулировку ДПТ.
Двигатель постоянного тока
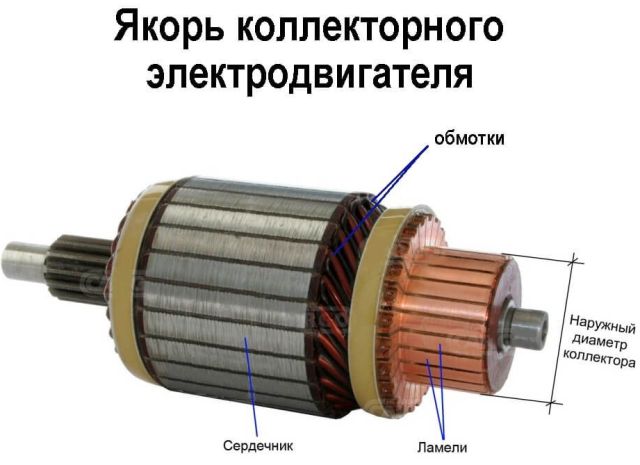
Самый распространенный электродвигатель, который используется в портативных устройствах, игрушках, радиоуправляемых моделях и других устройствах. На малых электродвигателя на статоре закреплены постоянные магниты, на роторе — обмотка.
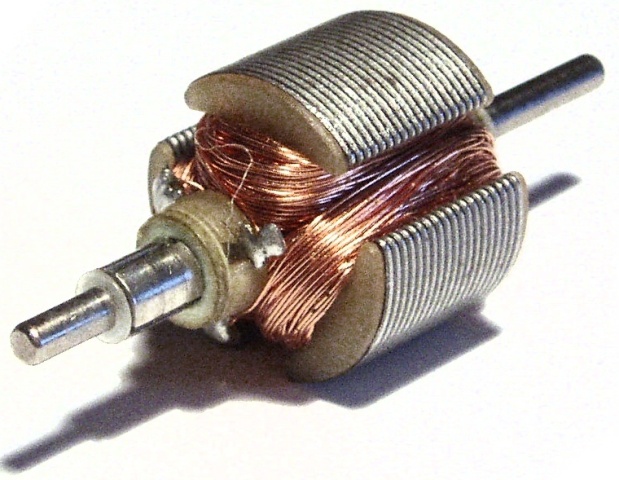
Ток в обмотку подается через щеточный узел. Щетки сделаны из графита, иногда встречаются медные скользящие контакты. Щетки скользят по ламелям расположенным на одном из концов ротора. Если не вдаваться в подробности, то от тока обмотки якоря зависит его скорость вращения.
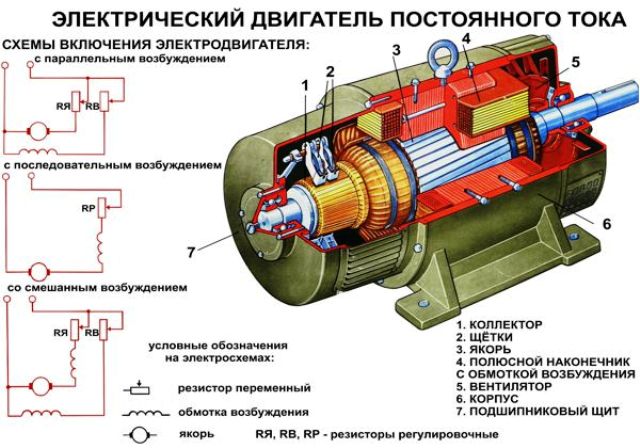
На крупных двигателях постоянного тока, на статоре, расположена обмотка возбуждения, соединенная с обмоткой ротора (через щеточный узел) определенным образом (последовательное, параллельное или смешанное возбуждение). Таким образом, достигается нужный крутящий момент и количество оборотов.
Управление скоростью вращения
При подключении к питающей сети двигатель постоянного тока начинает вращаться с номинальной скоростью. Чтобы понизить частоту вращения нужно ограничить ток. Для этого вводят балластные сопротивления, но это снижает КПД установки в целом и появляется лишний источник тепла. Для более эффективного регулирования напряжения и тока используют другой метод — ШИМ-регулирование.
Способ регулирования широтно-импульсной модуляцией сигнала (напряжения) заключается в формировании желаемой величины напряжения с помощью изменения ширины импульсов, при постоянной продолжительности периода (частоты).
То есть период делится на две части:
Отношение времени импульса к общему времени периода называют коэффициентом заполнения:
обратная величина называется «скважность»:
Для описания режима работы ШИМ-контроллера используют оба понятия: и коэффициент заполнения, и скважность.
Ток потребления двигателя зависит от его мощности. Число оборотов, как было сказано, зависит от тока. Ток можно регулировать, изменяя величину приложенного к обмоткам напряжения. Фактически при питании от напряжения, которое превышает номинальное по паспорту двигателя, его обороты также превысят номинальные. Однако такие режимы работы опасны для двигателя, поскольку в обмотках протекает больший ток, что вызывает их повышенный нагрев.
Если от кратковременных импульсов или повторно-кратковременных режимов работы вред для двигателя будет минимальным, то при продолжительной работе на повышенном напряжении и оборотах он сгорит или его подшипники нагреются и заклинят, а потом сгорят и обмотки, если не отключить питание.
При слишком низком входном напряжении маленькому двигателю может просто не хватить силы, чтобы сдвинуться с места. Поэтому нужно экспериментальным путем выяснить нормальные обороты и напряжения для конкретного двигателя не превышающие номинальные.
Подключаем к ардуино
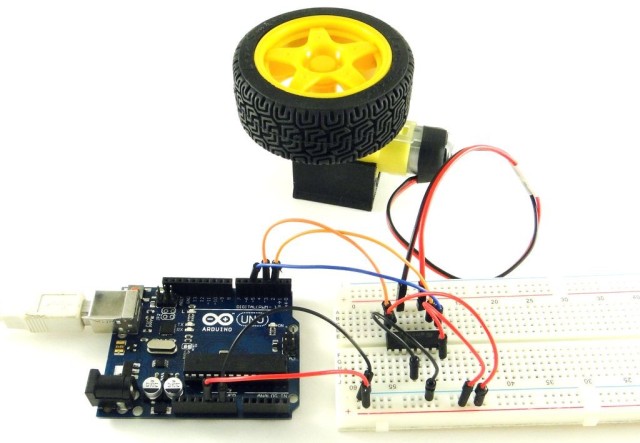
У меня лежал маленький моторчик, кажется от кассетного плеера, значит, его номинальное напряжение будет ниже 5 вольт, тогда выходного питания ардуины будет достаточно. Я запитаю его от пина «5V», т.е. от выхода линейного стабилизатора расположенного на плате. По схеме, которую вы видите ниже.
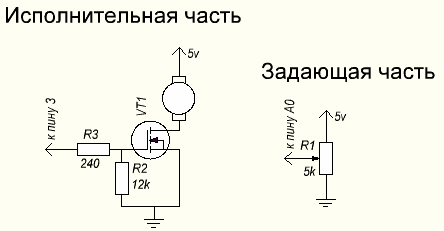
Я не знаю ток этого двигателя, поэтому я его подключил к питания, а между двигателем и пином питания установил полевой транзистор, на затвор которого был подан сигнал с ШИМ-выхода, можно использовать любой из доступных.
Для регулировки оборотов я добавил переменный резистор в схему, подключив его к аналоговому входу А0. Для быстрого соединения я использовал беспаечную макетную плату, как её еще называют «breadboard».
В обвязку транзистора я установил токоограничивающий резистор (для снижения тока заряда затворной ёмкости, это убережет порт от сгорания и питание микроконтроллера от просадок и его зависания) на 240 Ом, и притянул его к земле резистором на 12 кОм, это нужно делать, чтобы он стабильнее работал и быстрее разряжалась затворная ёмкость.
Подробно о полевых транзисторах описано в статье на нашем сайте. Я использовал мощный, распространённый и не слишком дорогой mosfet с n-каналом и встроенным обратным диодом IRF840.
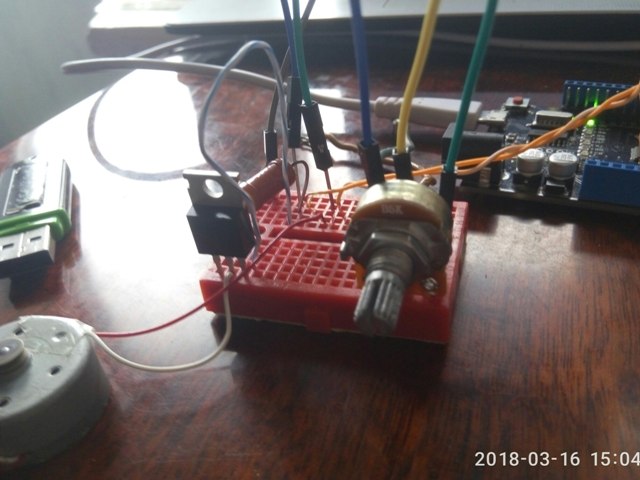
Вот так выглядит мой лабораторный стенд в сборе:
Функция ШИМ-регулирования вызывается при записи в соответствующий выход (3, 5, 6, 9, 10, 11) значения от 0 до 255 командой AnalogWrite(pin, значение). Логика её работы изображена на графиках ниже.