
 Внешний вид
Внешний вид  Fritzing
Fritzing  Условное обозначение на схеме
Условное обозначение на схеме
Сервопривод — это механизм с электромотором с управлением. Вы можете вращать механический привод на заданный угол с заданной скоростью или усилием.
Наиболее популярны сервоприводы, которые удерживают заданный угол и сервоприводы, поддерживающие заданную скорость вращения.
Сервоприводы имеют несколько составных частей. Привод — электромотор с редуктором. Зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять — рычаг в форме круга, крестовины или перекладинки для передачи вращающего движения на рабочий орган. Для контроля положения используется датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора и землю, третий доставляет управляющий сигнал, который используется для выставления положения устройства.

- Крутящий момент и скорость поворота
- Виды сервоприводов
- Подключение к Arduino
- Управляем через импульсы
- Библиотека Servo
- Sweep
- Случайные повороты
- Сервоприводы: подключение, управление, примеры работы
- Что такое сервопривод?
- Элементы сервопривода
- Электромотор с редуктором
- Позиционер
- Плата управления
- Выходной вал
- Выходной шлейф
- Управление сервоприводом
- Алгоритм работы
- Интерфейс управления
- Характеристики сервопривода
- Крутящий момент
- Скорость поворота
- Форм-фактор
- Внутренний интерфейс
- Материалы шестерней
- Коллекторные и бесколлекторные моторы
- Сервопривод постоянного вращения
- Примеры работы с Arduino
- Схема подключения
- Ограничение по питанию
- Ограничение по количеству подключаемых сервоприводов
- Пример использования библиотеки Servo
- Альтернативная библиотека Servo2
- Пример использования библиотеки Servo
- Примеры работы с Espruino
- Примеры работы с Raspberry Pi
- Вывод
Крутящий момент и скорость поворота
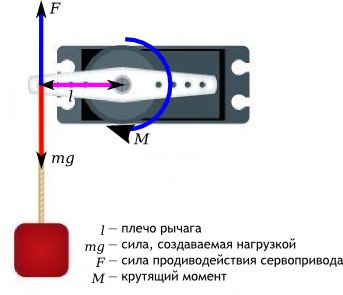
Крутящий момент — векторная физическая величина, равная произведению радиус-вектора, проведённого от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело. Эта характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода, чтобы повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё несложно вычислить скорость в более привычной величине, оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют такую единицу.
Иногда приходится искать компромисс между этими двумя характеристиками, так как если мы хотим надёжный, выдерживающий большой вес сервопривод, то мы должны быть готовы, что эта могучая установка будет медленно поворачиваться. А если мы хотим очень быстрый привод, то его будет относительно легко вывести из положения равновесия. При использовании одного и того же мотора баланс определяет конфигурация шестерней в редукторе.
Виды сервоприводов
Сервоприводы бывают аналоговые и цифровые. Различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
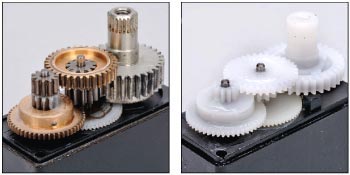
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостаток — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. Они достаточно дорогие.
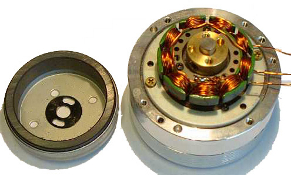
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. У бесколлекторных моторов нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Подключение к Arduino
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
- красный — питание; подключается к контакту 3.3/5V или напрямую к источнику питания
- коричневый или чёрный — земля
- жёлтый или белый — сигнал; подключается к цифровому выходу Arduino

Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega — 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Читайте также: Сколько нужно заливать масла в мотор альфа
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками/ передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°». Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Иногда при подключении серводвигателя не отрабатывают заданные команды или отрабатывают некорректно. Причина в том, что сервомоторы требуют достаточно большую мощность для питания, особенно в начале движения ротора. Эти резкие скачки потребляемой мощности могут сильно «просаживать» напряжение на Arduino. Может произойти даже перезагрузка платы. Если подобное происходит, вам надо добавить конденсатор (470 мкФ или больше) между рельсами GND и 5V на вашей макетке. Конденсатор выполняет роль своеобразного резервуара для электрического тока. Когда серводвигатель начинает работать, он получает остатки заряда с конденсатора и от источника питания Arduino одновременно. Длинная нога конденсатора — это позитивный контакт, она подключается к 5V. Отрицательный контакт часто маркируется символом ‘-‘.
Управляем через импульсы
Для начала попробуем управлять вручную без библиотек. Считываем показания из Serial Monitor — нужно ввести число от 0 до 9. Эти значения равномерно распределим на 180 градусов и получим 20 градусов на каждую единицу показаний.
Библиотека Servo
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода.
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Управление осуществляется следующими функциями:
- attach() — присоединяет объект к конкретному выводу платы. Возможны два варианта синтаксиса для этой функции: servo.attach(pin) и servo.attach(pin, min, max). При этом pin — номер пина, к которому присоединяют сервопривод, min и max — длины импульсов в микросекундах, отвечающих за углы поворота 0° и 180°. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно. Возвращаемого значения нет.
- write() — отдаёт команду сервоприводу принять некоторое значение параметра. Синтаксис: servo.write(angle), где angle — угол, на который должен повернуться сервопривод
- writeMicroseconds() — отдаёт команду послать на сервопривод имульс определённой длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий: servo.writeMicroseconds(uS), где uS — длина импульса в микросекундах. Возвращаемого значения нет.
- read() — читает текущее значение угла, в котором находится сервопривод. Синтаксис: servo.read(), возвращается целое значение от 0 до 180
- attached() — проверка, была ли присоединён объект к конкретному пину. Синтаксис следующий: servo.attached(), возвращается логическая истина, если объект была присоединён к какому-либо пину, или ложь в обратном случае
- detach() — производит действие, обратное действию attach(), то есть отсоединяет объект от пина, к которому был приписан. Синтаксис: servo.detach()
В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
Пример подключения двух сервоприводов.
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц, так как они используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2. Все методы библиотеки Servo2 совпадают с методами Servo.
При работе с сервоприводами на 360 градусов функции работают по другому.
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Среднее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Sweep
Скетч File | Examples | Servo | Sweep постоянно поворачивает насадку на 180 градусов и возвращает её обратно. В примере используется встроенная библиотека Servo.
Общая схема — красный провод идёт к питанию 5V, чёрный или коричневый идёт к GND, а жёлтый или белый к выводу платы (в нашем примере вывод 9).

Скетч File | Examples | Servo | Knob управляет сервоприводом при помощи потенциометра. В примере используется встроенная библиотека Servo.
Общая схема: у сервопривода — красный провод идёт к питанию 5V, чёрный или коричневый идёт к GND, а жёлтый или белый к выводу платы (в нашем примере вывод 9). У потенциометра средняя ножка соединяется с аналоговым выходом A0, остальные к питанию и земле.

Случайные повороты
Будем поворачивать серводвигатель на случайную величину. Практического смысла немного, но для демонстрации подойдёт.
Сервоприводы: подключение, управление, примеры работы
Познакомимся поближе с сервоприводами. Рассмотрим их разновидности, предназначение, подсказки по подключению и управлению.

Что такое сервопривод?
Сервопривод — это мотор с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервомотором является любой тип механического привода, имеющий в составе датчик положения и плату управления.
Простыми словами, сервопривод — это механизм с электромотором, который может поворачиваться в заданный угол и удерживать текущее положение.
Читайте также: Приора с мотором от опель
Элементы сервопривода
Рассмотрим составные части сервопривода.

Электромотор с редуктором
За преобразование электричества в механический поворот в сервоприводе отвечает электромотор. В асинхронных сервоприводах установлен коллекторный мотор, а в синхронных — бесколлекторный.
Однако зачастую скорость вращения мотора слишком большая для практического использования, а крутящий момент — наоборот слишком слабый. Для решения двух проблем используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, вращается выходной вал — конечная шестерня редуктора, к которой можно прикрепить нечто, чем мы хотим управлять.
Позиционер
Для контроля положения вала, на сервоприводе установлен датчик обратной связи, например потенциометр или энкодер. Позиционер преобразует угол поворота вала обратно в электрический сигнал.
Плата управления
За всю обработку данных в сервоприводе отвечает плата управления, которая сравнивает внешнее значения с микроконтроллера со показателем датчика обратной связи, и по результату соответственно включает или выключает мотор.
Выходной вал

Вал — это часть редуктора, которая выведена за пределы корпуса мотора и непосредственно приводиться в движение при подаче управляющих сигналов на сервопривод. В комплектации сервомоторов идут качельки разных формфакторов, которые одеваются на вал сервопривода для дальнейшей коммуникации с вашими задумками. Не рекомендуем прилагать к валу нагрузки, которые больше крутящего момента сервопривода. Это может привести к разрушению редуктора.
Выходной шлейф
Для работы сервопривода его необходимо подключить к источнику питания и к управляющей плате. Для коммуникации от сервопривода выходит шлейф из трёх проводов:
Если сервопривод питается напряжением от 5 вольт и потребляет ток менее 500 мА, то есть возможность обойтись без внешнего источника питания и подключить провод питания сервомотора непосредственно к питанию микроконтроллера.
Управление сервоприводом
Алгоритм работы
Интерфейс управления
Чтобы указать сервоприводу желаемое состояние, по сигнальному проводу необходимо посылать управляющий сигнал — импульсы постоянной частоты и переменной ширины.
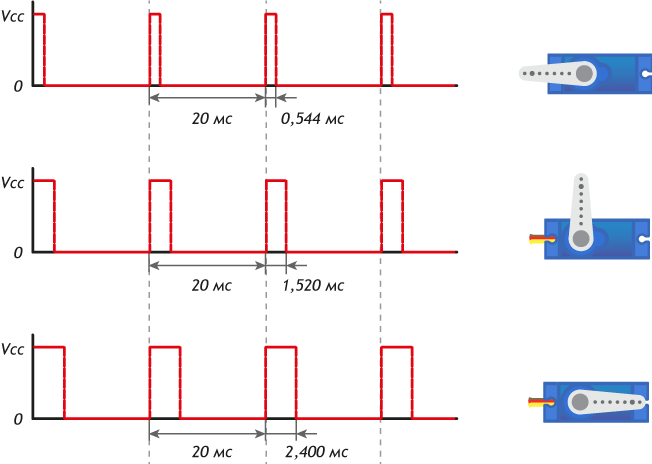
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал от микроконтроллера поступает в управляющую схему сервопривода, имеющийся в нём генератор импульсов производит свой импульс, длительность которого определяется через датчик обратной связи. Далее схема сравнивает длительность двух импульсов:
Для управления хобби-сервоприводами подают импульсы с частотой 50 Гц, т.е. период равен 20 мс:
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
Часто способ управления сервоприводами называют PWM (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation) в котором важна длина импульсов, а не частота.
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
| Форм-фактор | Вес | Размеры |
|---|---|---|
| Микро | 8-25 г | 22×15×25 мм |
| Стандартный | 40-80 г | 40×20×37 мм |
| Большой | 50-90 г | 49×25×40 мм |
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
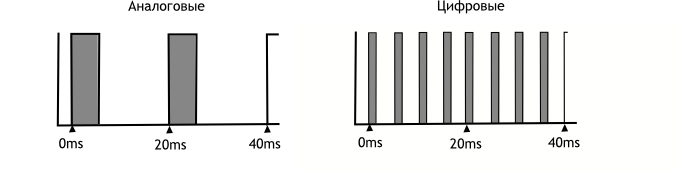
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
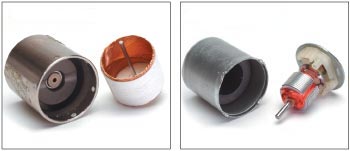
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2 . Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo .
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
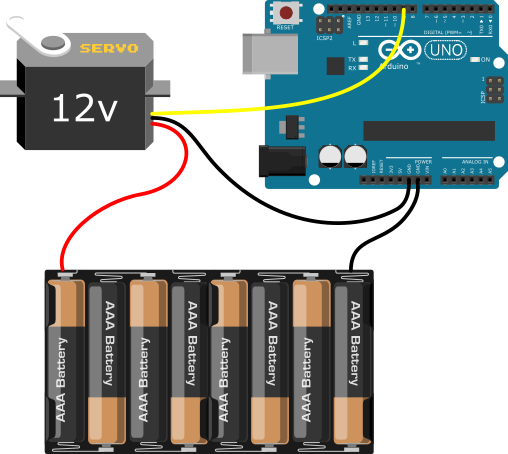
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
По аналогии подключим 2 сервопривода
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
Примеры работы с Espruino
Примеры работы с Raspberry Pi
Вывод
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала
- Правообладателям
- Политика конфиденциальности
Механика © 2023
Информация, опубликованная на сайте, носит исключительно ознакомительный характер