
Двигатель постоянного тока – это наиболее часто используемый тип двигателя в робототехнике и электронных устройствах. Для управления скоростью вращения такого двигателя можно использовать различные методы, но в этом проекте мы будем использовать для этой цели широтно-импульсную модуляцию (ШИМ). Управлять скоростью вращения двигателя постоянного тока мы будем с помощью потенциометра, поворачивая его ручку.

Общий принцип использования ШИМ
Управляя скоростью модуляции ШИМ (Pulse Width Modulation, PWM) можно регулировать, к примеру, силу свечения светодиода – данный принцип пояснен на следующем рисунке. Аналогичный механизм используется и для управления скоростью вращения двигателя.
Если на представленном рисунке выключатель будет замкнут на протяжении некоторого времени, то на протяжении этого же времени лампочка будет гореть. Если переключатель будет замкнут в течение 8ms и будет разомкнут 2ms в течение интервала 10ms, тогда лампочка будет гореть только в течение интервала 8ms. В рассмотренном примере можно сказать, что среднее выходное напряжение (на лампочке) будет составлять 80% от напряжения батареи.
В другом случае выключатель замыкается на 5ms и размыкается на эти же самые 5ms в течение интервала 10ms, таким образом среднее напряжение на лампочке будет составлять 50% от напряжения батареи. Принято говорить, что если напряжение батареи 5В и цикл занятости составляет 50%, то среднее напряжение на оконечном устройстве (лампочке) будет составлять 2.5В.
В третьем рассмотренном на рисунке случае цикл занятости составляет 20% и поэтому среднее напряжение на оконечном устройстве (лампочке) будет составлять 20% от напряжения батареи.
Применяя все сказанное к рассматриваемому нами примеру управления скоростью вращения двигателем можно сказать, что чем больше будет коэффициент заполнения ШИМ (отношение длительности ON состояния к периоду), тем выше будет скорость вращения двигателя.
Необходимые компоненты
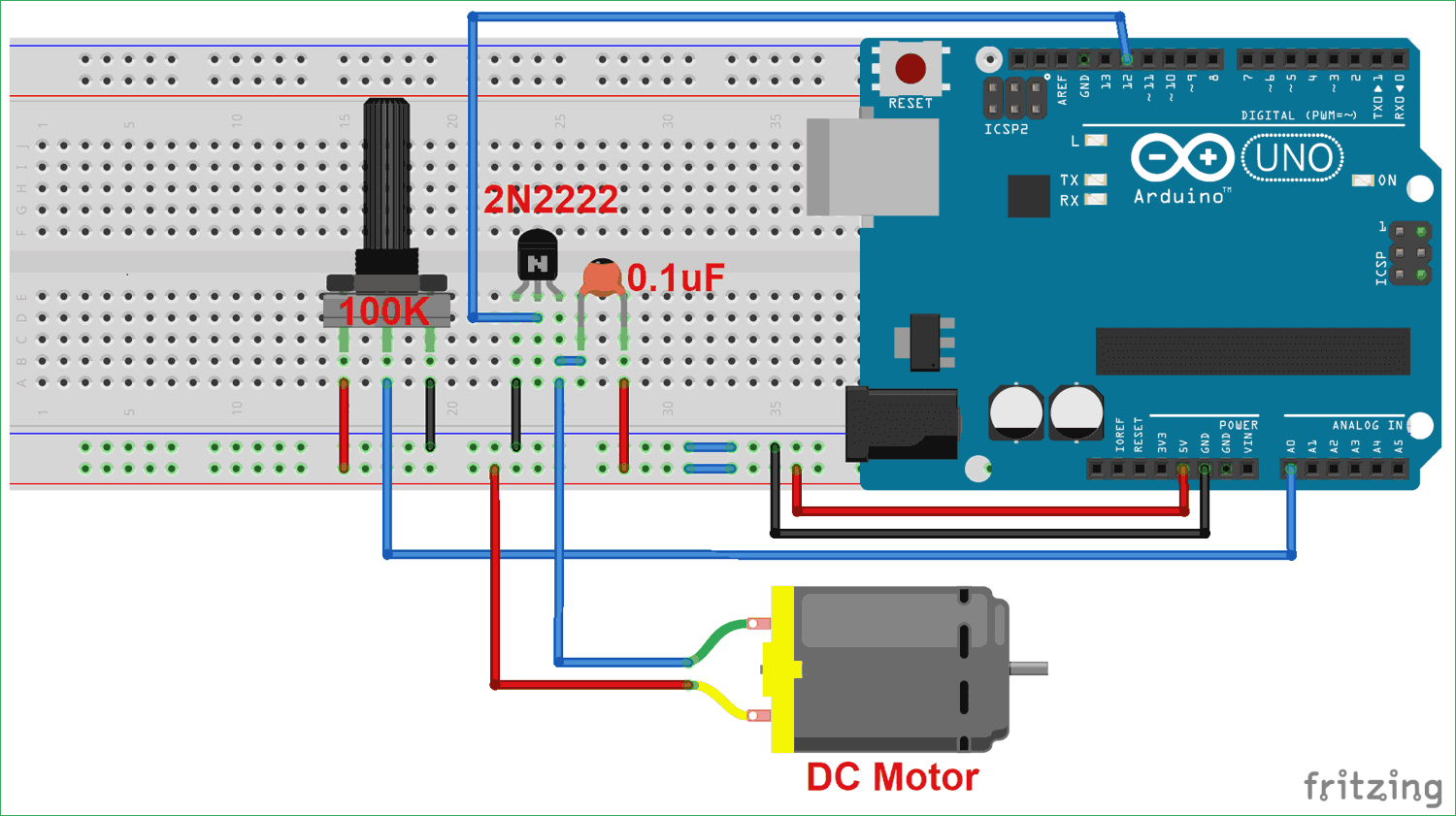
- Плата Arduino UNO (купить на AliExpress).
- Двигатель постоянного тока.
- Транзистор 2N2222 (купить на AliExpress).
- Потенциометр 100 кОм (купить на AliExpress).
- Конденсатор 0.1 нФ (купить на AliExpress).
- Макетная плата.
- Соединительные провода.
Схема устройства
Представлена на следующем рисунке.
 Объяснение работы программы
Объяснение работы программы
 Объяснение работы программы
Объяснение работы программыПолный текст программы приведен в конце статьи, в этом разделе объяснено назначение ключевых элементов кода.
В ниже представленных строчках кода мы инициализируем переменные c1 и c2 и назначаем аналоговый контакт A0 выходу потенциометра, а 12-й контакт будем использовать для ШИМ.
Управления скорость мотора постоянного тока
Борис Калинин
+7 961 683-09-01

28.1. Управление скоростью двигателя постоянного тока
В электродвигателях постоянного тока крутящий момент порождается реакцией между двумя магнитными полями: одно поле устанавливается стационарной обмоткой возбуждения, а другое – обмотками во вращающемся якоре. У некоторых двигателей постоянного тока отсутствует обмотка возбуждения, вместо которой установлены большие постоянные магниты, сохраняющие стационарное магнитное поле постоянным при любых рабочих условиях.
В любом случае, принцип работы электродвигателя постоянного тока заключается в том, что ток, проходя через якорь, создает магнитное поле, пытающееся выровняться со стационарным полем. И поэтому якорь вращается:

Однако, коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания происходит через угольные щетки. Эти щетки изнашиваются через определенное время (как и сам коллектор) и поэтому требуют периодической замены.
Большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху. Фотография большого (1250 л. с.) электромотора постоянного тока, используемого для приведения в движение парома, с обмотками и якорем показана здесь:


В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
- Момент прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря;
- Момент также прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
- Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов);
- Следовательно, скорость прямо пропорциональна напряжению якоря;
- Также скорость обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).
Очень простой способ управления скоростью и моментом двухобмоточного двигателя постоянного тока заключается в управлении величиной тока, проходящего через возбуждающую обмотку:

Уменьшающееся сопротивление токозадающего резистора, позволяет большему току протекать через возбуждающую обмотку, усиливая ее магнитное поле. Это окажет два эффекта на работу двигателя: во-первых, двигатель будет производить больший момент, чем был до этого (при той же величине тока якоря), так как более сильное магнитное поле якоря будет воздействовать на якорь; во-вторых, скорость двигателя уменьшится, так как большая противо-ЭДС будет генерироваться вращающимся якорем при той же скорости вращения, и эта противо-ЭДС естественно попытается сравняться с приложенным напряжением источника постоянного тока. С другой стороны, мы можем увеличить скорость электродвигателя постоянного тока (и уменьшить выходной момент) увеличением сопротивления управляющего резистора, ослабляя стационарное магнитное поле, которое вращает якорь.
Читайте также: Лучший мотор мерседес w211
Регулированием тока обмотки можно менять баланс между скоростью и моментом, но этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока мы также должны управлять напряжением и током якоря. Переменные резисторы можно применить и для этой задачи, но этот метод не используется в настоящее время, так как приводит к потере мощности.
Лучшим решением будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.


Такая электронная схема регулирования мощности обычно называется приводом. Таким образом, привод с регулируемой скоростью (или VSD ) – это высокомощная схема, используемая для управления скоростью двигателя постоянного тока. Моторные приводы могут быть вручную настроены на пуск двигателя с заданной скоростью, или могут принимать электронные управляющие сигналы для изменения скорости двигателя таким же образом как электронные сигналы управляют движением регулирующего клапана. Оснащенный дистанционной системой передачи управляющих сигналов, привод функционирует подобно любому другому конечному исполнительному элементу: следуя командам контроллера, стабилизирует некий технологический параметр, приближая его к уставке.
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры. Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел:

Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Привод постоянного тока просто регулирующий мощность, поступающую к двигателю, был бы непродуманным и трудно применимым для управления большинством процессов. Чего бы в идеале хотелось от регулируемого привода, так это точного управления скоростью двигателя. По этой причине большинство приводов рассчитано на получение обратной связи от тахометра, механически соединенного с валом мотора. Тахометр обычно представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала (с выходом 0-10 В). По его показаниям регулируемый привод дросселирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея встроенный контур обратной связи для регулирования скорости, регулируемый привод становится «ведомым контроллером» в системе управления. Привод может принимать выходной сигнал уставки скорости от любого контроллера:
Управление двигателями постоянного тока. Часть 1
Владимир Рентюк, Запорожье, Украина
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения

Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель – электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра – это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
К двигателям постоянного тока относятся два типа – это привычные для нас коллекторные двигатели и бесколлекторные (шаговые) двигатели. В первых переменное магнитное поле, обеспечивающее вращение вала двигателя, образуется обмотками ротора, которые запитываются через щеточный коммутатор – коллектор. Оно и взаимодействует с постоянным магнитным полем статора, вращая ротор. Для работы таких двигателей внешние коммутаторы не требуются, их роль выполняет коллектор. Статор может быть изготовлен как из системы постоянных магнитов, так и из электромагнитов. Во втором типе электродвигателей обмотки образуют неподвижную часть двигателя (статор), а ротор сделан из постоянных магнитов. Здесь переменное магнитное поле образуется путем коммутации обмоток статора, которая выполняется внешней управляющей схемой. Шаговые двигатели («stepper motor» в английском написании) значительно дороже коллекторных. Это достаточно сложные устройства со своими специфическими особенностями. Их полное описание требует отдельной публикации и выходит за рамки данной статьи. Для получения более полной информации по двигателям этого типа и их схемам управления можно обратиться, например, к [1].
Коллекторные двигатели (Рисунок 1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три – это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.