
Сегодня мы начинаем знакомство с шиной SPI (Serial Peripheral Interface).
Данная шина очень широко используется в электронике. Она очень удобна, являясь синхронной и полнодуплексной, поэтому, применяется во многих схемах для общения между различными цифровыми усторйствами – датчиками, контроллерами, драйверами и прочими устройствами.
Ещё одним важнейшим фактором необходимости нашего с ней знакомства является то, что данная шина аппаратно организована в контроллерах AVR.
Мало того, хотим мы этого или не хотим, с интерфейсом SPI мы с вами общаемся уже давным давно, как только начали первый раз прошивать наш контроллер, так как прошивается он именно посредством данного интерфейса.
Поэтому хочется познакомиться с данной шиной поближе.
Давайте откроем техническую документацию на контроллер Atmega8, откроем страницу, где изображена распиновка данного контроллера и посмотрим, что от 16 до 19 ножки и находятся выводы шины SPI
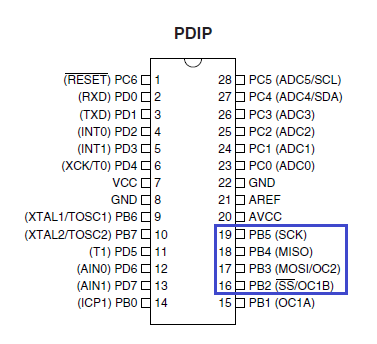
Теперь немного подробнее о данных выводах
SS (chip select) – это ножка выбора устройства. Если на ведомом устройстве на данной ножке установится низкий уровень, то данное устройство будет откликаться и обмениваться информацией по шине SPI, если высокий, то не будет.
MOSI (master output slave input) – это ножка выхода ведущего устройства и входа ведомого устройства.
MISO (master input slave output) – наоборот, выход ведомого, вход ведущего.
SCK – ножка синхронизации. Ко всем устройствам, участвующим в обмене информации по данной шине, подаются синхроимпульсы с определённой частотой.
Вот схема реализации шины SPI в контроллере Atmega8
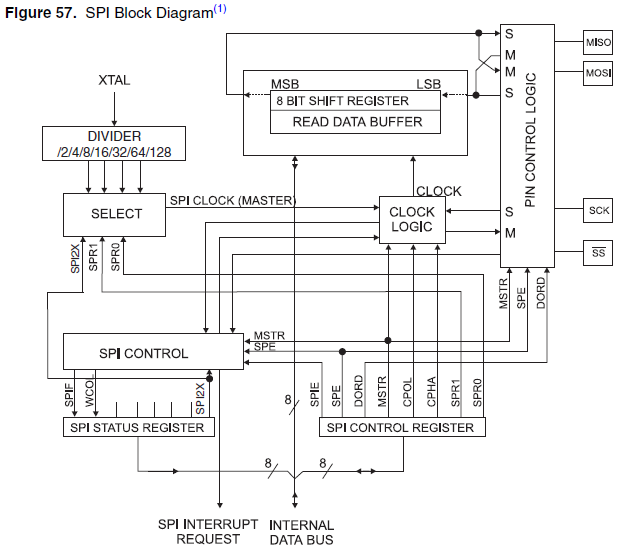
Как в любой шине, здесь имеется ряд регистров, в которых хранится определённая информация.
Нам интересен SHIFT REGISTER, через него и происходит обмен информации. Как только на ножке синхронизации будет определённый фронт, или нисходящий или восходящий, в зависимости от настройки, данные регистры у ведомого и ведущего устройства обменяются информацией, причем не всей информацией, а только одним битом. Данные регистры сдвинутся влево и старшие биты из каждого регистра уйдут в младшие биты такого же регистра сопряженного устройства. То есть ведомый передаст свой старший бит через ножку MOSI ведущему, который его запишет в освободившийся засчет сдвига влево младший бит, а ведомый свой вытесненный засчет сдвига передаст старший бит через ножку MISO в младший бит ведущего. Вот так и идёт обмен, то есть за 8 полных циклов тактирования они полностью обменяются байтами
Как только все 8 бит одного байта информации передадутся, определённый регистр нам просигнализирует о том, что данный процесс закончен. Вернее, определённый бит определённого регистра.
Также в блок-схеме мы видим делитель, на вход которого поступают тактовые импульсы и уже потом разделённые на определенное значение поступают по цепочке на ножку SCK и уже оттуда подаются на ведомое устройство на одноимённую ножку. Этим и обеспечивается синхронность работы устройств. Частота тактовых импульсов выбирается из наименьшей поддерживаемой всеми устройствами, участвующими в обмене.
Я говорю во множественном числе, так как может быть не только два устройства в данной цепи. Как это обеспечивается при условии, что у устройств нет никаких адресов, я сейчас и расскажу.
Читайте также: Датчики давления в шинах как поменять резину
Существует несколько способов обена информацией между несколькими устройствами, то есть когда на одно ведущее устройство приходится несколько ведомых. Мы рассмотрим два самых распространённых из них.
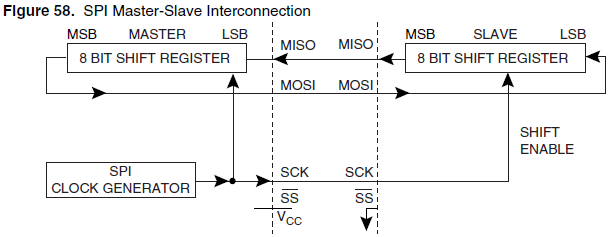
Первый способ – радиальный (нажмите на картинку для увеличения изображения)
Здесь мастер направляет данные к определённому устройству, включая на ножке SS логический 0. При данном способе возможно выбрать только одно устройство, также потребуются несколько свободных ножек портов контроллера.
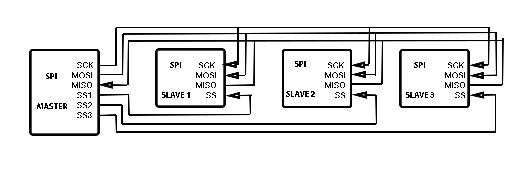
Есть ещё один интересный способ – кольцевой или каскадный (нажмите на картинку для увеличения изображения)
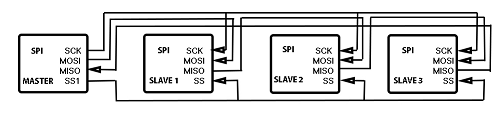
Здесь мы видим, что ножки выбора все запараллелены и обмен идёт по кругу. Тем самым скорость падает, засчёт того, что увеличивается круг передачи, но зато экономятся лапки портов.
Всё это мы в очередных занятиях изучим подробнее, когда будем использовать определённые устройства в наших проектах.
Ну, вроде со схемотехникой передачи данных по шине SPI мы разобрались.
Теперь разберёмся, как же данным процессом управлять на уровне аппаратных регистров контроллера AVR.
Данные регистры мы видим в блок-схеме выше на странице.
У Atmega8 существуют следующие регистры для обслуживания шины SPI.
SPDR (SPI Data Register) – регистр данных, в блок-схеме это DATA BUFFER. В этот регистр мы будем заносить байт для последующей его передачи на ведомое устройство и из него же будем читать байт информации, пришедший с ведомого устройства. Также не обязательно что у нас контроллер будет ведущим устройством. Впоследствии мы соберём схему из двух контроллеров, один из которых будет ведомым. Так что именно в этом регистре будет находиться байт и для отправки и для приёма.
SPCR (SPI Control Register) – управляющий регистр

Данный регистр включает в себя следующие биты:
SPIE (SPI Interrupt Enable) – бит, который разрешает прерывания.
SPE (SPI Enable) – бит, включающий шину SPI.
DORD (Data Order) – бит, устанавливающий порядок отправки бит, Если он установлен в 1, то первым отправляется младший бит, если в 0 – старший.
MSTR (Master/Slave Select) – бит, который назначает устройство ведущим либо ведомым. При установке данного бита 1 устройство будет ведущим.
CPOL (Clock Polarity) – полярность синхронизации, определяет, при каком фронте синхронизирующего импульса будет инициироваться режим ожидания

Если данный бит в 1, то режим ожидания будет у нас при восходящем фронте, а если в 0, то при нисходящем.
CPHA (Clock Phase) – бит, отвечающий за фазу тактирования, то есть по какому именно фронту будет осуществляться передача бита.

Посмотрим диаграммы передачи данных в зависимости от установки CPOL и CPHA
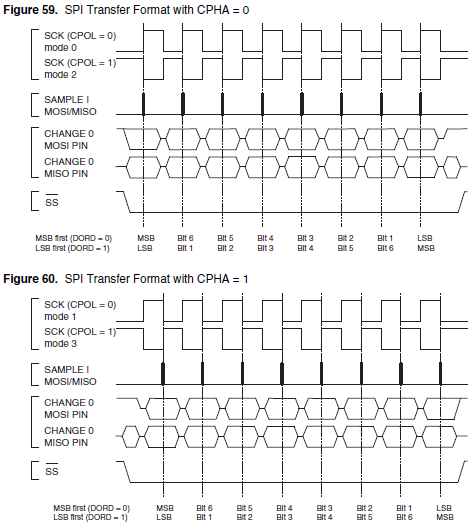
Вот такая вот интересная зависимость. Порой мы иногда видим в технических характеристиках какого нибудь устройства, что оно, к примеру, может работать в режиме SPI 0:0 и SPI 1:1, вот это как раз и касается настройки этих битов.
Читайте также: Шина транспортная проволочная лестничная типа крамера
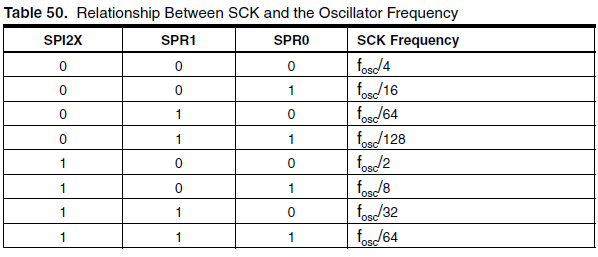
SPR1, SPR0 (SPI Clock Rate Select) – это биты, отвечающие за значение делителя частоты синхронизации, работают совместно с битом SPI2X, находящемся в регистре статуса. Он также управляющий, так как восьми бит в управляющем регистре под все настройки не хватило, а в статусном много свободных.
SPSR (SPI Status Register) – статусный регистр

SPI2X (Double SPI Speed Bit) – бит, удваивающий скорость, работающий совместно с битами SPR1 и SPR0 управляющего регистра.
Посмотрим зависимость частоты от данных трёх битов
SPIF (SPI Interrupt Flag) – Флаг прерывания. Установку данного бита в единицу мы ждём. когда принимаем байт. Как только байт от другого устройства появится полностью у нас в буфере, то данный флаг установится. Данный флаг работает только в случае установки бита, разрешающего прерывания, а также разрешения глобальных прерываний.
WCOL (Write COLlision Flag) – флаг конфликта, или коллизий, установится в том случае, если во время передачи данных будет конфликт битов, если во время передачи данных выполнится попытка записи в регистр данных.
Ну теперь мы, можно сказать, немного познакомились с интерфейсом SPI.
В следующем занятии мы уже попытаемся данную шину использовать на практике, подключив к нашему контроллеру какое-нибдуь ведомое устройство.
Купить программатор можно здесь (продавец надёжный) USBASP USBISP 2.0
Смотреть ВИДЕОУРОК (нажмите на картинку)
Видео:Передача данных - шина SPIСкачать

SPI -Serial Peripheral Interface, краткое руководство
Данная статья является кратким дискурсом по шине SPI и не должна восприниматься как точная техническая документация. Рассматривается только полнодуплексный вариант применения.
Видео:SPI шина на осциллографеСкачать

Общие сведения:
SPI — (Serial Peripheral Interface) эспиай, последовательный периферийный интерфейс иногда называемый 4-х проводным интерфейсом, является последовательным синхронным интерфейсом передачи данных. Изобретён компанией Motorola в середине 1980-x. В отличие от I2C и UART, SPI требует больше сигналов для работы, но может работать на более высоких скоростях. Не поддерживает адресацию, вместо этого используется сигнал SS (slave select — выбор ведомого), который также иногда называется CS (chip select), CE (chip enable) или SE (slave enable). Поддерживает только одного ведущего на шине. Ведущий устанавливает скорость обмена данными и другие параметры, такие как полярность и фаза тактирования. Обмен данными происходит в режиме полного дуплекса, что означает устройства на шине могут одновременно передавать и принимать данные. Интерфейс использует следующие сигналы (в номенклатуре AVR, для получения точного названия сигналов обратитесь к технической документации микросхемы, с которой работаете):
- MISO (master in slave out) — вход ведущего, выход ведомого
- MOSI (master out slave in) — выход ведущего, вход ведомого
- SCK (serial clock) — сигнал тактирования
- SS (slave select) — сигнал выбор ведомого.
Несмотря на то, что интерфейс называется 4-х проводным, для подключения нескольких ведомых понадобится по одному проводу SS для каждого ведомого (в полнодуплексной реализации). Сигналы MISO, MOSI и SCK являются общими для всех устройств на шине. Ведущий посылает сигнал SS для того ведомого, обмен данными с которым будет осуществляться. Простыми словами, все ведомые, кроме выбранного ведущим будут игнорировать данные на шине. SS является инверсным (active-low), что означает что ведущему необходимо прижать эту линию для выбора ведомого.
🌟 Видео
Лекция 307. Интерфейс SPIСкачать

Левые и правые шины. Асимметричные и направленные. Разница?Скачать

AVR 38# Последовательный интерфейс SPIСкачать

MCP2515, контроллер CAN шины с интерфейсом SPIСкачать

SPI интерфейсСкачать

Микросхемы и программаторы, Шины I2C и SPIСкачать

О шине SPI и библитоеке SPI. Arduino.Скачать

Введение в шину I2CСкачать

Видеоуроки по Arduino. Интерфейсы SPI (8-я серия, ч1)Скачать

AVR 39# Управление сдвиговым регистром 595 посредством SPIСкачать

лекция 349 Atmega8 интерфейс SPIСкачать

Видеоуроки по Arduino. Интерфейсы SPI (8-я серия, ч2)Скачать

Интерфейсы :: SPI :: Часть 1:: Общие сведенияСкачать

Лекция 304 Шинный формировательСкачать

Цифровые интерфейсы: 04. SPI (Периферийный последовательный интерфейс)Скачать

Лекция 309. 1-wire интерфейсСкачать
