
Подключение мотора к Ардуино ► потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения коллекторного двигателя к Arduino.
Подключение мотора постоянного тока к Ардуино (коллекторного двигателя) требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля L298N. В обзоре размещены схемы подключения и коды программ для всех перечисленных вариантов.
- Управление двигателем на Ардуино
- Как подключить моторчик к Arduino
- Скетч. Подключение мотора через транзистор
- Пояснения к коду:
- Скетч. Подключение мотора через драйвер
- Управление шаговым двигателем с помощью Arduino и драйвера A4988
- Микросхема драйвера шагового двигателя A4988
- Распиновка драйвера A4988
- Выводы питания
- Выводы выбора микрошага
- Выводы управления
- Выводы управления питанием A4988
- Выводы для подключения шагового двигателя
- Система охлаждения — радиатор
- Ограничение тока
- Способ 1:
- Способ 2:
- Подключение драйвера шагового двигателя A4988 к Arduino UNO
- Код Arduino — простой пример
- Пояснение к скетчу:
- Скетч Arduino — использование библиотеки AccelStepper
- Установка библиотеки
- Скетч Arduino
- Пояснение к скетчу:
Управление двигателем на Ардуино
Коллекторный моторчик может быть рассчитан на разное напряжения питания. Если двигатель работает от 3-5 Вольт, то можно моторчик подключать напрямую к плате Ардуино. Моторы для машинки с блютуз управлением, которые идут в комплекте с редукторами и колесами рассчитаны уже на 6 Вольт и более, поэтому ими следует управлять через полевой (биполярный) транзистор или через драйвер L298N.
Принцип работы и устройство мотора постоянного тока
На схеме показано устройство моторчика постоянного тока и принцип его работы. Как видите, для того, чтобы ротор двигателя начал крутиться к нему необходимо подключить питание. При смене полярности питания, ротор начнет крутиться в обратную сторону. Драйвер двигателей L298N позволяет инвертировать направление вращения мотора fa 130, поэтому его удобнее использовать в своих проектах.
Как подключить моторчик к Arduino
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- мотор постоянного тока (Motor DC);
- транзистор полевой/биполярный;
- драйвер двигателей L298N;
- провода «папа-папа», «папа-мама».
Перед выбором способа управления двигателем от Arduino Uno r3, уточните на какое напряжение рассчитан ваш моторчик. Если питание требуется более 5 Вольт, то следует использовать транзистор или драйвер. Распиновка транзисторов может отличаться от приведенного примера (следует уточнить распиновку для своего типа). Драйвер L298N позволит не только включать мотор, но и изменять направление вращения.
Скетч. Подключение мотора через транзистор
Подключение мотора через транзистор к Ардуино потребуется, если двигатель никак не хочет включаться от платы напрямую, то следует использовать порт 5 Вольт на микроконтроллере или внешний источник питания. Транзистор будет играть роль ключа, замыкая/размыкая электрическую цепь. Сам транзистор управляется цифровым портом. Соберите схему, как на картинке и загрузите программу.
Подключение FA-130 мотора постоянного тока — Motor DC Arduino
Пояснения к коду:
- при необходимости можно подключить два мотора FA-130 к Ардуино;
- в зависимости от характеристик, двигатель подключается к 3,3 или 5 Вольтам.
Скетч. Подключение мотора через драйвер
Подключение мотора к Ардуино через драйвер L298N или Motor Shield L293D позволит менять направление вращения ротора. Но для использования данных модулей потребуется установить соответствующие библиотеки для Ардуино. В примере мы использовали схему подключения двигателя с помощью модуля L298N. Соберите схему, как на картинке ниже и загрузите следующий скетч с использованием.
Управление шаговым двигателем с помощью Arduino и драйвера A4988
Если вы планируете создать свой собственный 3D-принтер или станок с ЧПУ, вам нужно будет управлять несколькими шаговыми двигателями. Если использовать для этого только Arduino, то большая часть скетча будет занята кодом управления шаговыми двигателями и не останется много места для чего-то еще.
Данную проблему можно решить, использовав специальный автономный драйвер шагового двигателя — A4988 .

Модуль A4988 может контролировать как скорость, так и направление вращения биполярного шагового двигателя, такого как NEMA 17, использую всего два вывода контроллера.
Шаговые двигатели используют зубчатое колесо и электромагниты (катушки), позволяющие вращать ось по одному шагу за раз.
Драйвер двигателя посылает высокий импульс на соответствующую катушку, которая в свою очередь притягивает ближайший зуб зубчатого колеса, в результате чего ось двигателя проворачивается на определенный градус (шаг).
От характера управляющих импульсов зависит поведение шагового двигателя, а именно:
- Последовательность импульсов определяет направление вращения двигателя.
- Частота импульсов определяет скорость двигателя.
- Количество импульсов определяет угол поворота.
Читайте также: Как снять вентилятор с мотора отопителя
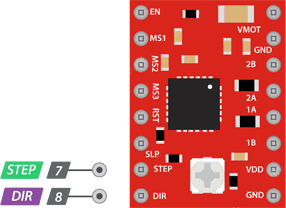
Микросхема драйвера шагового двигателя A4988
Модуль собран на чипе A4988. Не смотря на свой малый размер (всего 0,8 ″ × 0,6 ″), но обладает хорошими характеристиками.

Драйвер шагового двигателя A4988 имеет высокую выходную мощность (до 35 В и 2 А) и позволяет управлять одним биполярным шаговым двигателем с выходным током до 2 А на катушку, например NEMA 17.
Для удобства работы драйвер имеет встроенный транслятор. Использование транслятора позволило уменьшить количество управляющих контактов до 2, один для управления шагами, а другой для управления направлением вращения.
Драйвер предлагает 5 различных разрешений шага, а именно:
Распиновка драйвера A4988
Драйвер A4988 имеет всего 16 контактов, которые связывают его с внешним миром. Распиновка у A4988 следующая:

Давайте ознакомимся со всеми контактами по очереди.
Выводы питания
На самом деле A4988 требует подключения двух источников питания.

VDD и GND используется для управления внутренней логической схемой. Напряжение питания должно находиться в пределах от 3 до 5,5 В.
Vmot и GND для обеспечения питания шагового двигателя. Тут напряжение в пределах от 8 до 35 В.
Согласно datasheet, для питания двигателя требуется соответствующий разделительный конденсатор рядом с платой, способный выдерживать ток 4 А.
Этот драйвер имеет на плате керамические конденсаторы с низким ESR , что делает его уязвимым для скачков напряжения. В некоторых случаях эти выбросы могут превышать 35 В (максимальное номинальное напряжение A4988), и это может потенциально необратимо повредить плату и даже двигатель.
Один из способов защитить драйвер от таких скачков — подключить электролитический конденсатор емкостью 100 мкФ (или как минимум 47 мкФ) к контактам источника питания двигателя.
Выводы выбора микрошага
Драйвер A4988 допускает использование режима микрошага. Это достигается за счет подачи питания на катушки с промежуточными уровнями тока.

Например, если вы решите управлять шаговым двигателем NEMA 17 с шагом 1,8 градуса (200 шагов на оборот) в режиме 1/4 шага, то двигатель будет выдавать 800 микрошагов на оборот.
Драйвер A4988 имеет три вывода селектора размера шага (разрешения), а именно: MS1, MS2 и MS3. Установив соответствующие логические уровни на эти контакты, мы можем настроить двигатели на одно из пяти ступенчатых разрешений.

По умолчанию эти три контакта подтянуты к земле внутренним резисторам. Если мы оставим эти выводы не подключенными, то двигатель будет работать в режиме полного шага.
Выводы управления
Драйвер A4988 имеет два управляющих входа, а именно: STEP и DIR.
STEP — управляет микрошагом мотора. Каждый высокий импульс, отправляемый на этот вывод, приводит двигатель в действие на количество микрошагов, заданное выводами Microstep Selection (MS1, MS2 и MS3). Чем быстрее импульсы, тем быстрее будет вращаться двигатель.
DIR — управляет направлением вращения двигателя. Если на него подать высокий уровень, то двигатель будет вращается по часовой стрелке, а если низкий — против часовой стрелки.
Если вы просто хотите, чтобы двигатель вращался только в одном направлении, то вы можете соединить вывод DIR непосредственно с VCC или GND соответственно.
Выводы STEP и DIR не подтянуты внутренними резисторами, поэтому вы не должны оставлять их не подключенными.
Выводы управления питанием A4988
A4988 имеет три различных вывода для управления состоянием питания, а именно. EN, RST и SLP.
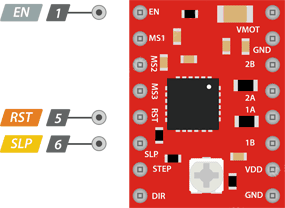
EN — вывод включения (0)/ выключения (1) драйвера A4988. По умолчанию на этом выводе установлен низкий уровень, поэтому драйвер всегда включен.
SLP — подача на данный вывод сигнала низкого уровня переводит драйвер в спящий режим, сводя к минимуму потребление энергии. Вы можете использовать это для экономии энергии.
Читайте также: Субару с мотором от приоры
RST — при подаче сигнала низкого уровня все входные данные STEP игнорируются, до тех пор пока не будет установлен высокий уровень. Низкий уровень также сбрасывает драйвер, устанавливая внутренний транслятор в предопределенное состояние Home. Исходное состояние — это в основном начальное положение, с которого запускается двигатель, и оно различается в зависимости от разрешения микрошага.
Если вам не нужно использовать вывод RST, вы можете подключить его к соседнему контакту SLP / SLEEP, чтобы вывести его на высокий уровень и включить драйвер.
Выводы для подключения шагового двигателя
Выходные контакты: 1B, 1A, 2A и 2B.

К этим выводам можно подключить любой биполярный шаговый двигатель с напряжением питания от 8 до 35 В.
Каждый выходной контакт модуля может обеспечить ток до 2 А. Однако величина тока, подаваемого на двигатель, зависит от источника питания системы, системы охлаждения и настройки ограничения тока.
Система охлаждения — радиатор
Чрезмерное рассеивание мощности микросхемы драйвера A4988 приводит к повышению температуры, которая может выйти за пределы возможностей микросхемы, что, вероятно, приведет к ее повреждению.
Даже если микросхема драйвера A4988 имеет максимальный номинальный ток 2 А на катушку, микросхема может подавать только около 1 А на катушку без перегрева.
Для достижения более 1 А на катушку требуется радиатор или другой метод охлаждения.

Драйвер A4988 обычно поставляется с радиатором. Желательно установить его перед использованием драйвера.
Ограничение тока
Перед использованием драйвера нам нужно сделать небольшую настройку. Нам нужно ограничить максимальный ток, протекающий через катушки шагового двигателя, и предотвратить превышение номинального тока двигателя.

На драйвере A4988 есть небольшой потенциометр, который можно использовать для установки ограничения тока. Вы должны установить ограничение по току равным или ниже номинального тока двигателя.
Для этого есть два метода:
Способ 1:
В данном случае мы собираемся установить ограничение тока путем измерения напряжения (Vref) на выводе «ref».
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов/об, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP.
- Во время регулировки измерьте напряжение Vref (один щуп мультиметра на минус питания, а другой к металлическому корпусу потенциометра).
- Отрегулируйте напряжение Vref по формуле:
ограничение тока = Vref x 2,5
Например, если ваш двигатель рассчитан на 350mA, вы должны установить опорное напряжение 0,14В.

Способ 2:
В данном случае мы собираемся установить ограничение тока, измеряя ток, протекающий через катушку двигателя.
- Взгляните на техническое описание вашего шагового двигателя. Запишите его номинальный ток. В нашем случае мы используем NEMA 17 200 шагов / оборот, 12 В 350 мА.
- Переведите драйвер в полношаговый режим, оставив три контакта выбора микрошага отключенными.
- Удерживайте двигатель в фиксированном положении, не синхронизируя вход STEP. Не оставляйте вход STEP висящим в воздухе, подключите его к источнику питания логики (5 В)
- Подключите амперметр последовательно с одной из катушек шагового двигателя и измерьте фактический ток.
- Возьмите небольшую отвертку и отрегулируйте потенциометр ограничения тока, пока не установите номинальный ток шагового двигателя.

Подключение драйвера шагового двигателя A4988 к Arduino UNO
Теперь, когда мы имеем всю необходимую информацию о драйвере A4988, мы можем перейти к подключению его к нашей Arduino Uno .
Подключения довольно простое. Начните с подключения VDD и GND (рядом с VDD) к контактам 5V и минус на Arduino. Входные контакты DIR и STEP подключите к цифровым контактам №2 и №3 на Arduino соответственно. Шаговый двигатель подключите к контактам 2B, 2A, 1A и 1B.
Подключение или отключение шагового двигателя при включенном драйвере может привести к его повреждению.
Читайте также: Bmw e36 вибрация мотора
Затем подключите вывод RST к соседнему выводу SLP/SLEEP, чтобы драйвер оставался включенным. Также держите контакты выбора микрошага отключенными, чтобы двигатель работал в полношаговом режиме.
Наконец, подключите источник питания двигателя к контактам VMOT и GND. Не забудьте установить большой развязывающий электролитический конденсатор 100 мкФ на контакты источника питания двигателя, рядом с платой.

Код Arduino — простой пример
Следующий скетч даст вам полное представление о том, как управлять скоростью и направлением вращения биполярного шагового двигателя с помощью драйвера шагового двигателя A4988, и может служить основой для более практических экспериментов и проектов.
Пояснение к скетчу:
Скетч начинается с определения выводов Arduino, к которым подключены выводы STEP и DIR A4988. Мы также определяем stepsPerRevolution. Установите его в соответствии со спецификациями шагового двигателя.
В разделе setup() кода все контакты управления двигателем объявлены как цифровой выход.
В цикле loop() мы медленно вращаем двигатель по часовой стрелке, а затем быстро вращаем его против часовой стрелки с интервалом в секунду.
Управление направлением вращения: для управления направлением вращения двигателя мы устанавливаем вывод DIR в высокое или низкое положение. Сигнал высокого уровня вращает двигатель по часовой стрелке, а низкого — против часовой стрелки.
Скорость двигателя определяется частотой импульсов, которые мы посылаем на вывод STEP. Чем чаще импульсы, тем быстрее вращается двигатель. Импульсы — это не что иное, как установка высокого уровня, некоторое ожидание, затем установка низкого уровня и снова ожидание. Изменяя задержку между двумя импульсами, вы изменяете частоту этих импульсов и, следовательно, скорость двигателя.
Скетч Arduino — использование библиотеки AccelStepper
Управление шаговым двигателем без библиотеки идеально подходит для простых приложений с одним двигателем. Но если вы хотите управлять несколькими шаговыми двигателями, то вам понадобится библиотека.
Итак, для нашего следующего эксперимента мы будем использовать расширенную библиотеку шаговых двигателей под названием AccelStepper library. Она поддерживает:
- Ускорение и замедление.
- Одновременное управление несколькими шаговыми двигателями с независимым шагом для каждого двигателя.
Эта библиотека не включена в IDE Arduino, поэтому вам необходимо сначала установить ее.
Установка библиотеки
Чтобы установить библиотеку, перейдите в Эскиз> Include Library> Manage Libraries… Подождите, пока диспетчер библиотек загрузит индекс библиотек и обновит список установленных библиотек.
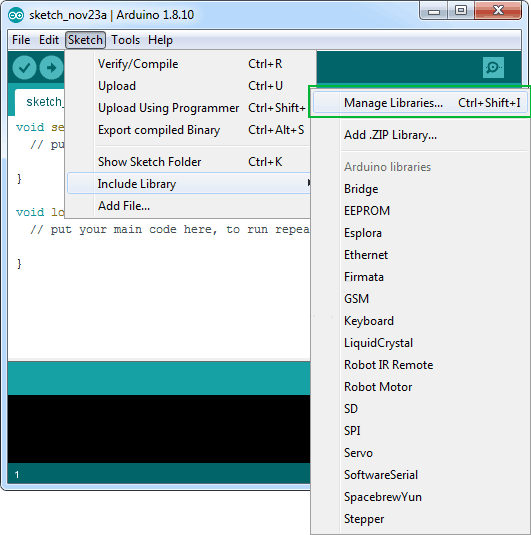
Отфильтруйте результаты поиска, набрав «Accelstepper». Щелкните первую запись и выберите «Установить».

Скетч Arduino
Вот простой код, который ускоряет шаговый двигатель в одном направлении, а затем замедляется, чтобы остановиться. Как только двигатель совершает один оборот, он меняет направление вращения. И он повторяет это снова и снова.
Пояснение к скетчу:
Мы начинаем с подключения недавно установленной библиотеки AccelStepper.
Определяем выводы Arduino, к которым подключаются выводы STEP и DIR A4988. Устанавливаем motorInterfaceType значение 1. (1 означает внешний шаговый драйвер с выводами Step и Direction).
Затем мы создаем экземпляр библиотеки с именем myStepper.
В функции setup() мы сначала устанавливаем максимальную скорость двигателя 1000. Затем мы устанавливаем коэффициент ускорения для двигателя, чтобы добавить ускорение и замедление к движениям шагового двигателя.
Затем мы устанавливаем обычную скорость 200 и количество шагов, например, 200 (поскольку NEMA 17 совершает 200 шагов за оборот).
В функции loop() мы используем оператор If, чтобы проверить, как далеко двигателю нужно проехать (путем чтения distanceToGo), пока он не достигнет целевой позиции (moveTo). Как только distanceToGo станет равен нулю мы переключаем двигатель в противоположное направление, изменив moveTo на противоположное значение относительно его текущего положения.
Теперь в конце цикла мы вызываем функцию run(). Это самая важная функция, поскольку шаговый двигатель не будет работать, пока эта функция не будет выполнена.
- Свежие записи
- Чем отличается двухтактный мотор от четырехтактного
- Сколько масла заливать в редуктор мотоблока
- Какие моторы бывают у стиральных машин
- Какие валы отсутствуют в двухвальной кпп
- Как снять стопорную шайбу с вала