
В этой статье мы будем подключать двигатель постоянного тока к Arduino Uno и управлять скоростью его вращения. Делать мы это будем с помощью ШИМ (широтно-импульсной модуляции, в англ. языке PWM — Pulse Width Modulation) – эта функция реализована в Arduino чтобы на основе постоянного напряжения иметь возможность получения изменяющегося напряжения.

Видео:Уроки Arduino. Расширенное управление кнопкойСкачать

Общие принципы ШИМ
Метод осуществления ШИМ показан на следующем рисунке.
Если на представленном рисунке кнопка нажата, то двигатель начнет вращение и он будет вращаться до тех пор пока кнопка не будет отжата. Эта ситуация происходит если кнопка будет нажата постоянно – верхний график на представленном рисунке. Если же мы будем нажимать кнопку только в течение 8 мс из всего цикла в 10 мс, то в этом случае двигатель уже не будет в полной мере получать все напряжение батареи 9 В – в этом случае среднеквадратичная величина напряжения, получаемого двигателем, будет около 7 В. Соответственно, двигатель по сравнению с первым случаем (когда кнопка нажата постоянно) будет вращаться с меньшей скоростью. Поэтому цикл занятости (который еще называют коэффициентом заполнения ШИМ) в этом случае составит время включенного состояния/(время включенного состояния + время выключенного состояния) = 8/(8+2)=80%.
В следующих рассмотренных на рисунке случаях кнопка будет находиться в нажатом состоянии еще меньше чем в рассмотренном случае (80%). Соответственно, среднеквадратичная величина напряжения, получаемого двигателем, будет составлять еще меньшую величину, поэтому и скорость вращения двигателя также уменьшится. Это уменьшение скорости вращения двигателя вследствие уменьшения среднеквадратичной величины напряжения будет происходить до тех пор, пока получаемое двигателем напряжение не станет не достаточным для его вращения. То есть, изменяя величину цикла занятости (коэффициент заполнения ШИМ), можно управлять скоростью вращения двигателя постоянного тока.
Видео:Подключение КНОПКИ до Arduino (ИНСТРУКЦИЯ)Скачать

Принцип работы H-моста
Перед тем, как переходить непосредственно к управлению двигателем, обсудим что такое H-BRIDGE (H-мост). Собранная нами далее схема будет осуществлять две функции: управлять двигателем постоянного тока с помощью управляющих сигналов малой мощности и изменять направление вращения двигателя.
Нам известно, что для изменения направления вращения двигателя постоянного тока необходимо изменить полярность приложенного к нему питающего напряжения. И как раз для смены полярности напряжения хорошо подходит устройство, называемое H-мостом. На представленном выше рисунке мы имеем 4 выключателя. Как показано на рисунке 2 если выключатели A1 и A2 замкнуты, то ток через двигатель течет справа налево как показано на второй части рисунка 2 – то есть в этом случае двигатель будет вращаться по часовой стрелке. А если выключатели A1 и A2 разомкнуты, а B1 и B2 – замкнуты, то ток через двигатель в этом случае будет протекать слева направо как показано на второй части рисунка, то есть двигатель будет вращаться против часовой стрелки. В этом и заключается принцип работы H-моста.
Мы в качестве H-моста будем использовать специализированную микросхему L293D, которую еще называют драйвером двигателей. Эта микросхема предназначена для управления двигателями постоянного тока малой мощности (см. рисунок) и содержит в своем составе два H-моста, то есть с ее помощью можно управлять двумя двигателями. Эта микросхема часто используется для управления двигателями в различных роботах.
Читайте также: Как проверить мотор вентилятора наружного блока кондиционера
В следующей таблице указаны необходимые значения напряжений на выводах INPUT1 и INPUT2 микросхемы L293D для смены направления вращения двигателя.
| Enable Pin | Input Pin 1 | Input Pin 2 | Motor Direction |
| High | Low | High | вправо |
| High | High | Low | влево |
| High | Low | Low | стоп |
| High | High | High | стоп |
То есть, чтобы двигатель вращался по часовой стрелке необходимо чтобы на 2A было напряжение высокого уровня (high), а на контакте 1A – напряжение низкого уровня (low). Аналогично для вращения двигателя против часовой стрелки необходимо обеспечить на 1A напряжение высокого уровня, а на 2A – низкого.
Как показано на следующем рисунке Arduino UNO имеет 6 ШИМ каналов (обозначенных на плате специальным знаком – тильдой), любой из которых мы можем использовать для получения изменяющего напряжения (на основе ШИМ). В данном проекте мы будем использовать в качестве ШИМ выхода контакт PIN3 Arduino UNO.

Видео:Управление двигателем постоянного тока, линейным приводом. АрдуиноСкачать

Необходимые компоненты
- Плата Arduino UNO (купить на AliExpress).
- Драйвер двигателей L293D (купить на AliExpress).
- Электродвигатель постоянного тока.
- Светодиод (купить на AliExpress).
- Резистор 10 кОм (2 шт.) (купить на AliExpress).
- Кнопка (2 шт.).
- Конденсатор 100 пФ (купить на AliExpress).
- Переключатель.
- Источник питания с напряжением 5 В.
Видео:Управление двигателем постоянного тока. Схема управления мотором Ардуино проекты.Скачать

Работа схемы
Схема устройства (на макетной плате) представлена на следующем рисунке.
В рассматриваемой схеме мы имеем две кнопки, у каждой из которых, естественно, будет присутствовать эффект, называемый «дребезгом контактов». Но в данном случае для нас он не будет нести никакого негативного эффекта и не будет вызывать ошибок в работе схемы.
На нашем сайте мы уже рассматривали управление ШИМ с помощью микроконтроллера AVR ATmega и это управление было не самым простым делом – необходимо было сконфигурировать различные регистры. В отличие от этого управление ШИМ в Arduino UNO является крайне простым занятием, не требующем всего этого.
Видео:Уроки Arduino - управление бесколлекторным моторомСкачать

Исходный код программы
По умолчанию все необходимые заголовочные файлы подключаются автоматически самой средой ARDUINO IDE, она же конфигурирует сама и все регистры, необходимые для работы ШИМ, поэтому нам в программе уже не нужно заботиться об этих вещах. Все что нам нужно будет сделать – это определить на каком контакте мы будем использовать ШИМ.
То есть для использования ШИМ на нужном контакте нам необходимо сделать следующие вещи:
pinMode(ledPin, OUTPUT)
analogWrite(pin, value)
analogWriteResolution(neededresolutionnumber)
Сначала мы должны выбрать один из доступных 6 выходов (контактов) ШИМ. Потом необходимо установить этот контакт в режим на вывод данных.
После этого мы должны задействовать функции ШИМ на этом выходе используя функцию “ analogWrite(pin, value) ”. Здесь ‘pin’ обозначает номер контакта, на котором мы будем использовать ШИМ, в нашем случае это будет 3-й контакт.
Value в этой функции представляет собой цикл занятости (коэффициент заполнения) ШИМ, оно может принимать значения от 0 (всегда выключено) до 255 (всегда включено). Мы будем увеличивать и уменьшать это значение с помощью кнопок, присутствующих на схеме.
Плата Arduino UNO имеет максимальное разрешение (разрешающую способность) ШИМ, равную 8, что означает что value в функции analogWrite(pin, value) может принимать значения от 0 до 255. Но если в этом есть необходимость, мы можем уменьшать разрешение ШИМ используя функцию “ analogWriteResolution() ”, в скобках которой мы можем записать число в диапазоне 4-8, которое и будет определять разрешающую способность ШИМ платы Arduino UNO.
Читайте также: Какие документы выдаются при покупке лодочного мотора
Переключатель на схеме служит для изменения направления вращения двигателя.
А теперь непосредственно сам код программы с комментариями.
Видео:Уроки Arduino #6 - отработка нажатия кнопки при помощи флажковСкачать

Работа с кнопками
Кнопка является простейшим устройством, при помощи которого можно управлять ходом программы на микроконтроллере, но физически она выполняет очень простую функцию: замыкает и размыкает контакт. Кнопки бывают нескольких типов:
- С фиксацией – кнопка остаётся нажатой после отпускания, без фиксации – отключается обратно.
- Нормально разомкнутая (Normal Open, NO) – при нажатии замыкает контакты. Нормально замкнутая (Normal Closed, NC) – при нажатии размыкает контакты.
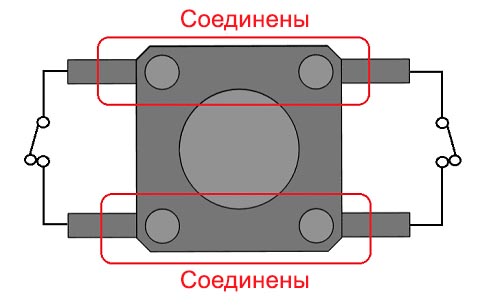
- Тактовые кнопки – замыкают или размыкают контакт. У обычных тактовых кнопок ноги соединены вдоль через корпус (см. картинку ниже). Переключатели – обычно имеют три контакта, общий COM, нормально открытый NO и нормально закрытый NC. При отпущенной кнопке замкнута цепь COM-NC, при нажатой замыкается COM-NO.
Видео:Привод для жалюзи на базе Arduino uno своими руками. Управление шаговыми моторами с помощью кнопок.Скачать

Подключение и подтяжка
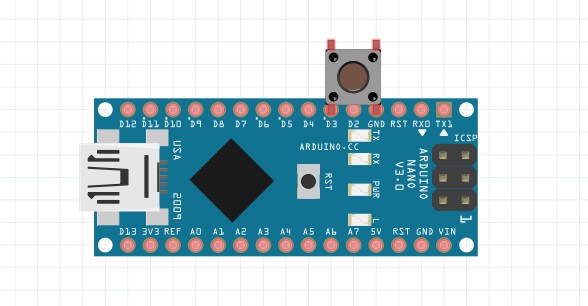
Из урока про цифровые пины вы помните, что микроконтроллер может считывать напряжение со своей ноги. Соответственно кнопка может подать на пин тот уровень, к которому подключена её вторая нога. В том же уроке мы обсуждали, что не подключенный никуда цифровой пин принимает наводки из воздуха, и считанное с него значение будет практически случайным. То есть подключив к пину 5V (сигнал высокого уровня) через кнопку, мы ничего не добьёмся: при нажатой кнопке на пине будет считываться четкий сигнал высокого уровня, а при отпущенной – случайное значение. Для решения этой проблемы существует такое понятие, как подтяжка (pull) пина. Подтяжка выполняется к земле (pull down) или питанию (pull up) микроконтроллера при помощи резистора. Подтяжка выполняется противоположно принимаемому сигналу, т.е. если нужно ловить высокий сигнал, подтяжка выполняется к земле, если ловить нужно сигнал земли – подтяжка выполняется к питанию. Вот два варианта подключения кнопки, с подтяжкой к VCC и GND соответственно: Как выбирается сопротивление резистора? Тут всё очень просто: при нажатии на кнопку через резистор потечёт ток, так как в любом случае замыкается цепь питание-земля. Чем выше ток, больше потери энергии и нагрев резистора, а это никому не нужно, поэтому сопротивление резистора подтяжки обычно выбирается в диапазоне 5-50 кОм. Если ставить больше – подтяжка может не обеспечить стабильный уровень сигнала на пине, а если ставить меньше – будут больше потери энергии в нагрев резистора: при сопротивлении в 1 ком через него потечёт ток величиной 5 В/1000 Ом = 5 мА, для сравнения плата Ардуино с МК в активном режиме потребляет 20-22 мА. Чаще всего для подтяжки используется резистор на 10 кОм. Как вы помните из урока о цифровых пинах, у МК AVR есть встроенные резисторы для всех GPIO, эти резисторы подключены к питанию (к VCC), то есть буквально дублируют первую схему из этого урока и позволяют не использовать внешний резистор. У микроконтроллеров другой архитектуры бывает подтяжка к GND, или вообще может не быть внутренней подтяжки. При использовании подтяжки к питанию мы получим инвертированный сигнал – функция digitalRead() вернёт 1 при отпущенной кнопке, и 0 при нажатой (при использовании нормально-разомкнутой кнопки). Давайте подключим кнопку на пин D3 (и GND):
Читайте также: Что такое подвесной мотор короткая нога
Видео:Уроки Arduino. Управление моторами с библиотекой GyverMotorСкачать

Алгоритмы
Отработка нажатия
В большинстве реальных применений работать с текущим состоянием кнопки очень неудобно, например когда действие должно быть выполнено однократно при нажатии на кнопку, т.е. по клику. Чуть усложним конструкцию, добавив один флаг, который будет помнить состояние кнопки. Такая конструкция позволяет отслеживать нажатие и отпускание кнопки и реагировать на них однократно:
Дребезг контактов
Кнопка не идеальна, и контакт замыкается не сразу, какое-то время он “дребезжит”. Прогоняя данный алгоритм, система опрашивает кнопку и условия приблизительно за 6 мкс, то есть кнопка опрашивается 166’666 раз в секунду! Этого достаточно, чтобы получить несколько тысяч ложных срабатываний. Избавиться от дребезга контактов можно как аппаратно, так и программно: аппаратно задача решается при помощи RC цепи, то есть резистора (
100nF). Выглядит это следующим образом:
Программно можно ввести простейший таймер нажатия, основанный на millis() , время гашения дребезга примем 100 миллисекунд. Вот так будет выглядеть код:
Рекомендуется конечно же использовать аппаратный способ, так как он не нагружает ядро лишними расчетами. В 99.99% проектов будет достаточно программного антидребезга, так то смело используйте конструкцию с millis() .
“Импульсное” удержание
В устройствах с управлением кнопкой очень часто бывает нужна возможность изменения значения как однократно кликом по кнопке, так и “автоматически” с тем же шагом – при удержании. Такой вариант реализуется очень просто, добавлением ещё одного условия в наш предыдущий алгоритм, а именно: если кнопка была нажата, но ещё не отпущена, и прошло времени больше, чем задано – условие вернёт true . В примере ниже периодичность “нажатий” при удержании настроена на 500 миллисекунд (2 раза в секунду):
Пользоваться таким кодом напрямую будет неудобно, поэтому можно “обернуть” его в класс (читай урок про классы и урок про написание библиотек).
Простейший класс кнопки
Вот так предыдущий пример можно сделать классом (мы делали это вот в этом уроке), положить его в отдельный файл (button.h) и пользоваться:
Другие возможности кнопки
Кнопка только с виду кажется простым устройством, дающим 0 и 1, но, подключив фантазию и время, можно придумать гораздо больше применений обычной кнопке. В моей библиотеке GyverButton реализовано очень много всяких интересных возможностей по работе с кнопкой, вот список:
- Работа с нормально замкнутыми и нормально разомкнутыми кнопками
- Работа с подключением PULL_UP и PULL_DOWN Опрос кнопки с программным антидребезгом контактов (настраиваемое время)
- Отработка нажатия, удерживания, отпускания, клика по кнопке (+ настройка таймаутов)
- Отработка одиночного, двойного и тройного нажатия (вынесено отдельно)
- Отработка любого количества нажатий кнопки (функция возвращает количество нажатий)
- Функция изменения значения переменной с заданным шагом и заданным интервалом по времени
- Возможность работы с “виртуальными” кнопками (все возможности библиотеки используются для матричных и резистивных клавиатур)
Подробное описание библиотеки можно почитать в заголовочном файле на странице библиотеки, также там есть много примеров.
Видео:Подключение кнопки к ардуино. Aрдуино для начинающих #6Скачать

Аналоговые клавиатуры
Аналоговые клавиатуры – достаточно глубокая тема, достойная отдельного урока (у меня его пока что нет). Максимально подробный урок-исследование можно посмотреть на сайте Codius.
Видео:Управление моторами с ArduinoСкачать

Видео
📹 Видео
Уроки Arduino #5 - работа с цифровыми портами и подключение кнопкиСкачать

ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]Скачать
![ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]](https://i.ytimg.com/vi/jJQwmnyfw5k/0.jpg)
SG90 сервопривод Управление кнопками Подключение сервомотораСкачать

Вращение шагового двигателя вправо влево от двух кнопок от Arduino с ускорениемСкачать

Подключение энкодера к Ардуино. Управление мотором энкодер.Скачать

КАК ПОДКЛЮЧАТЬ КНОПКИ К АРДУИНО [Уроки Arduino #7]Скачать
![КАК ПОДКЛЮЧАТЬ КНОПКИ К АРДУИНО [Уроки Arduino #7]](https://i.ytimg.com/vi/zABamFB3W4M/0.jpg)
Уроки Arduino - управление сервомашинкойСкачать

Уроки Arduino #8 - управление релеСкачать

управляем шаговым двигателем с телефона Двигатель 28byj 48Скачать

🔘 Как подключить КНОПКУ к ARDUINO правильно?Скачать
